

Substation robot inspection target automatic tracking method and system
An automatic tracking and robot technology, which is applied in the field of automatic tracking method and system for robot inspection targets in substations, can solve problems such as inaccurate positioning, loss, and inspection target deviation, and achieves expansion of training data, reduction of occupancy rate, and increase of diversity. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
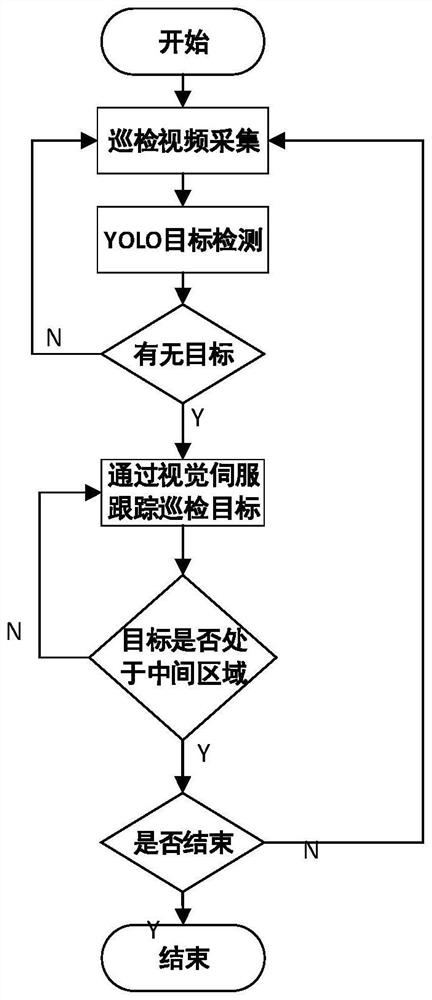
[0037] In one or more embodiments, an automatic tracking method for inspection targets of a substation robot is disclosed. First, the substation inspection robot collects inspection videos through a mounted visible light camera, decomposes the video frames into multiple images, and uses the images to predict The processing technology processes the image to filter the interference of the background and other stray light on the device identification; then uses the deep learning-based multi-target detection algorithm YOLO to locate the inspection target; finally, through the visual servo method, combined with the inspection target The position coordinates in the image calculate the deflection direction of the camera, so that the inspection target is always in the middle area of the video.
[0038] As a specific implementation manner, the present embodiment is an automatic tracking method for a robot inspection target in a substation, which combines figure 1 , which includes the...
Embodiment 2
[0058] In one or more embodiments, an automatic tracking system for robot inspection targets in substations is disclosed, including:
[0059] The data acquisition module is used to acquire the robot inspection video data and preprocess it;
[0060] The inspection target recognition module is used to identify the target image position of the robot inspection equipment based on the preprocessed video image data and the trained target detection model;
[0061] The target tracking module is used to determine the distance and relative position between the center point of the inspection equipment and the center point of the image, and calculate the deflection direction of the camera mounted on the inspection robot, so that the target image is always in the center of the image.
[0062] It should be noted that the specific implementation of the above modules has been described in the first embodiment, and will not be described in detail here.
Embodiment 3
[0064] In one or more embodiments, a terminal device is disclosed, including a server, the server including a memory, a processor, and a computer program stored on the memory and executable on the processor, the processor executing the During the program, the automatic tracking method for the inspection target of the substation robot in the first embodiment is realized. For brevity, details are not repeated here.
[0065] It should be understood that, in this embodiment, the processor may be a central processing unit (CPU), and the processor may also be other general-purpose processors, digital signal processors, DSPs, application-specific integrated circuits (ASICs), off-the-shelf programmable gate arrays (FPGAs), or other programmable logic devices. , discrete gate or transistor logic devices, discrete hardware components, etc. A general purpose processor may be a microprocessor or the processor may be any conventional processor or the like.
[0066] The memory may include...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More