

USB interface based personal manipulator system
A universal serial bus and manipulator technology, applied to manipulators, memory systems, program-controlled manipulators, etc., can solve the problems of limited length of USB communication cables, and achieve the effects of convenient upgrades and function changes, flexible use, and flexible systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
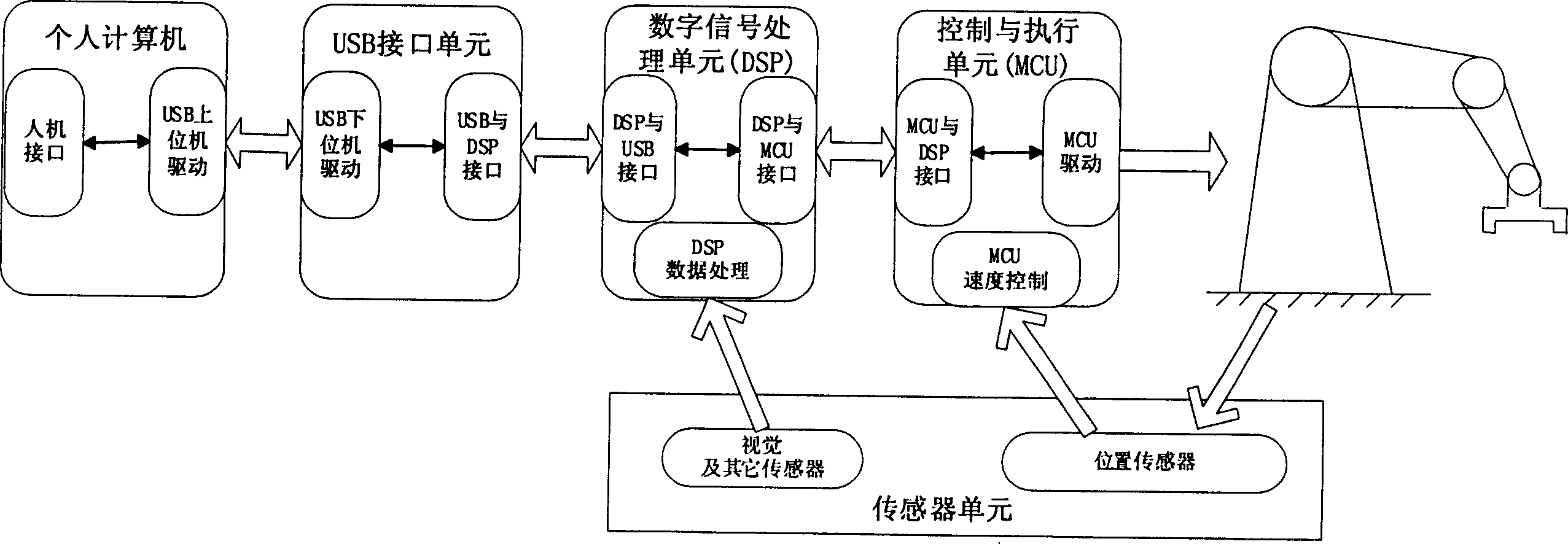
[0018] Depend on figure 1 As shown, the plug-and-play technology of the robotic arm system is realized by the USB interface, and USB is proposed by Intel, which provides hot-swappable functions and is supported by today's mainstream operating systems; for the processing unit of the robotic arm, it consists of two parts Composition, the digital signal processing unit is composed of DSP, and its own hardware characteristics make DSP have a great advantage in digital signal processing compared with general X86 processors. The work to be processed mainly includes task interpretation from the personal computer, data analysis from various sensors and final decision-making. A single-chip microcomputer is used as the control and execution unit, mainly to complete the control of the execution unit and the processing of sensor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More