

Plane location method for whole knee-joint replacement by robot
A technology of total knee replacement and plane positioning, which is applied in the field of advanced manufacturing and automation, can solve the problems of a large amount of computer running time, increase the operation cost, and high complexity, and achieve the effect of avoiding errors, simple method, and easy implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to better understand the technical solutions of the present invention, a further detailed description will be made below in conjunction with the accompanying drawings and embodiments.
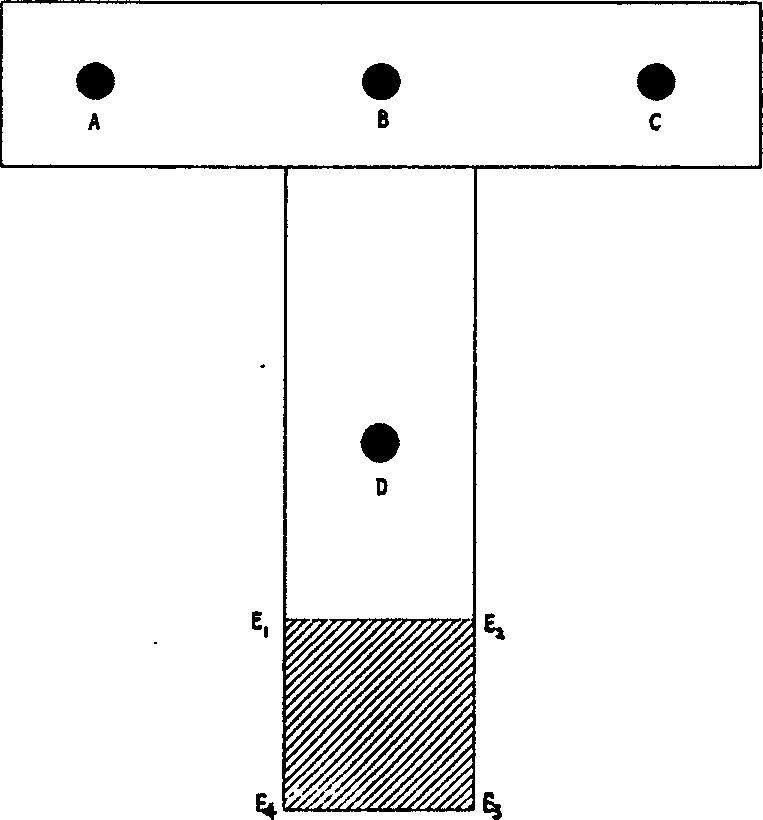
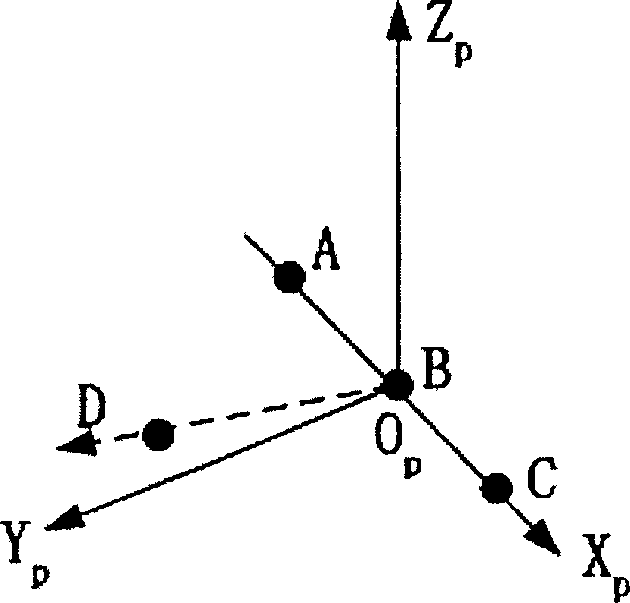
[0022] Figure 1 is The probe designed for the positioning plane of the present invention, A, B, C, D are mark points composed of four infrared light-emitting diodes, E 1 E. 2 E. 3 E. 4 As the positioning plane on the probe, A, B, and C should be on the same straight line as much as possible, and BD should be perpendicular to the straight line formed by ABC as much as possible. definition is the X-axis, since the three points B, C, and D are coplanar, then define is the Y axis, then X×Y is the Z axis, and B is the origin (such as figure 2 ).
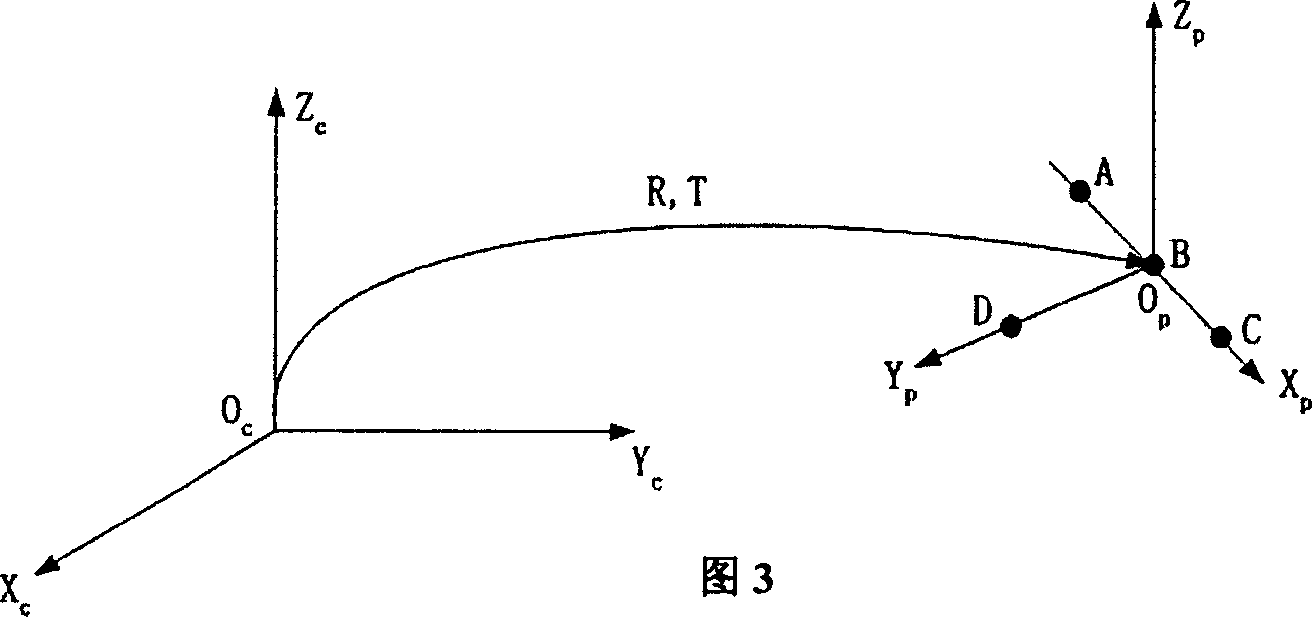
[0023] FIG. 3 is a schematic diagram of the relationship between the probe coordinate system and the camera coordinate system. Let the coordinates of point A in the camera be (X A c , Y A c ,Z A c ), where the superscript ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More