

Vehicular status signal system
A vehicle status and signal system technology, applied in the field of vehicle signal lighting system, can solve the problems of preventing hijacking and abuse of vehicles, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
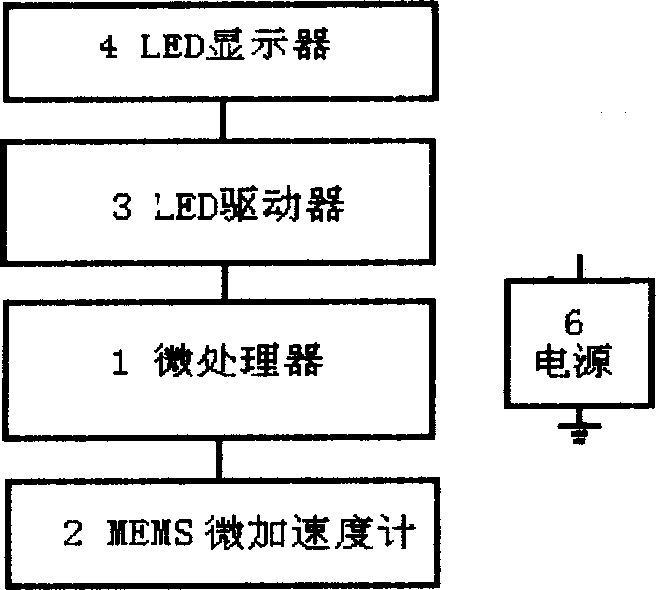
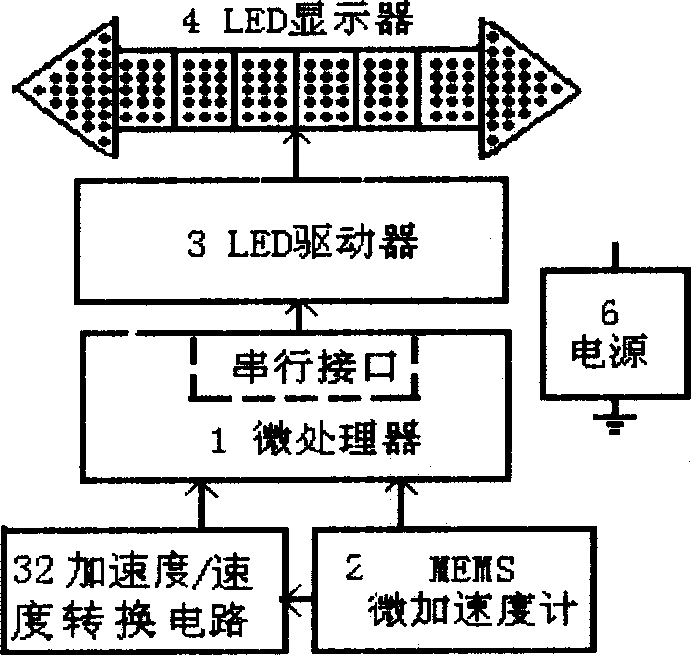
[0135] Embodiment 1: as figure 1 As shown in Figure 5, microprocessor 1 uses AT89C2051 microcontroller, micro accelerometer 2 uses micro accelerometer MXD2020 with MEMS dual-axis digital signal output, LED driver 3 uses 8-bit constant current drive integrated circuit HM63595, and HM68595 consists of an 8-bit string In-parallel-out, serial-in-serial-out shift register, 8-bit data latch and 8-bit constant current driver are composed of three main parts. The shift register receives serial input data, outputs serial data, and provides parallel data to the latch. Shift registers and latches have independent clock inputs CLOCK. The LED display 4 adopts dual primary color LEDs. The vehicle dynamic / static state signal collected automatically by MXD2020 is output from Doutx and Douty ports to both ends of INT0 and INT1 of AT89C2051 single-chip microcomputer in the form of digital pulse width duty ratio, and the pulse width is measured by interrupt mode to complete the vehicle dynami...
Embodiment 2
[0136] Embodiment 2: as Figure 2-2 As shown in Figure 6, the basic principle of this example is the same as that of Embodiment 1. The LED driver 3 uses a dedicated integrated drive circuit HM62726. And 16-bit driver consists of three main parts. The shift register receives serial input data, outputs serial data, and provides parallel data to the latch. The shift register and the latch have independent clock input terminals CLK, and there is an asynchronous reset terminal for the shift register. The output current value of the driver can be controlled by the external resistor R12 to achieve constant current output. The LED display 4 also adopts dual primary color LEDs.
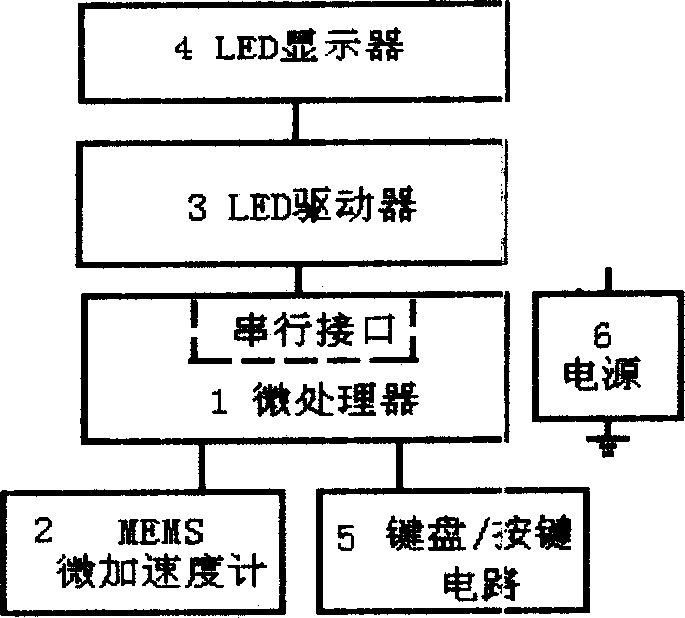
[0137] The difference is that the microprocessor 1 adopts the P87LPC76X single-chip microcomputer, and the micro-accelerometer 2 adopts the micro-accelerometer ADXL202 with MEMS dual-axis digital signal output. Output from Doutx and Douty ports to both ends of INT0 and INT1 of P87LPC76X single-chip microco...
Embodiment 3
[0138] Embodiment 3: as figure 1 As shown in FIG. 7 , the basic principle of this example is the same as that of Example 1, and the LED display 4 also adopts dual primary color LEDs. The difference is that microprocessor 1 adopts PCI16C71X single-chip microcomputer, micro accelerometer 2 adopts micro accelerometer ADXL311 with MEMS dual-axis analog signal output, LED driver 3 adopts triode or FET drive circuit, and ADXL311 automatically collects the dynamic / static state of the vehicle The signal is output as an analog signal from the Xout and Yout ports to the two ends of AN0 and AN1 of the PCI16C71X single-chip microcomputer, and the internal A / D conversion of the single-chip microcomputer is used to complete the vehicle dynamic / static state signal input, and then the result is output through the PCI16C71X analysis and processing program and passed through 8 The bit parallel port is output to the triode drive circuit, thereby driving the dual-color LED display, and displayin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More