

Ultra-redundancy all-directional movable operating arm
A technology of all-round movement and mobile operation, applied in the field of manipulators, can solve the problems of limited working space and working range, lack of ability to walk in all directions, difficulty in adapting to complex working environments, etc. The effect of disassembly and assembly and resource saving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
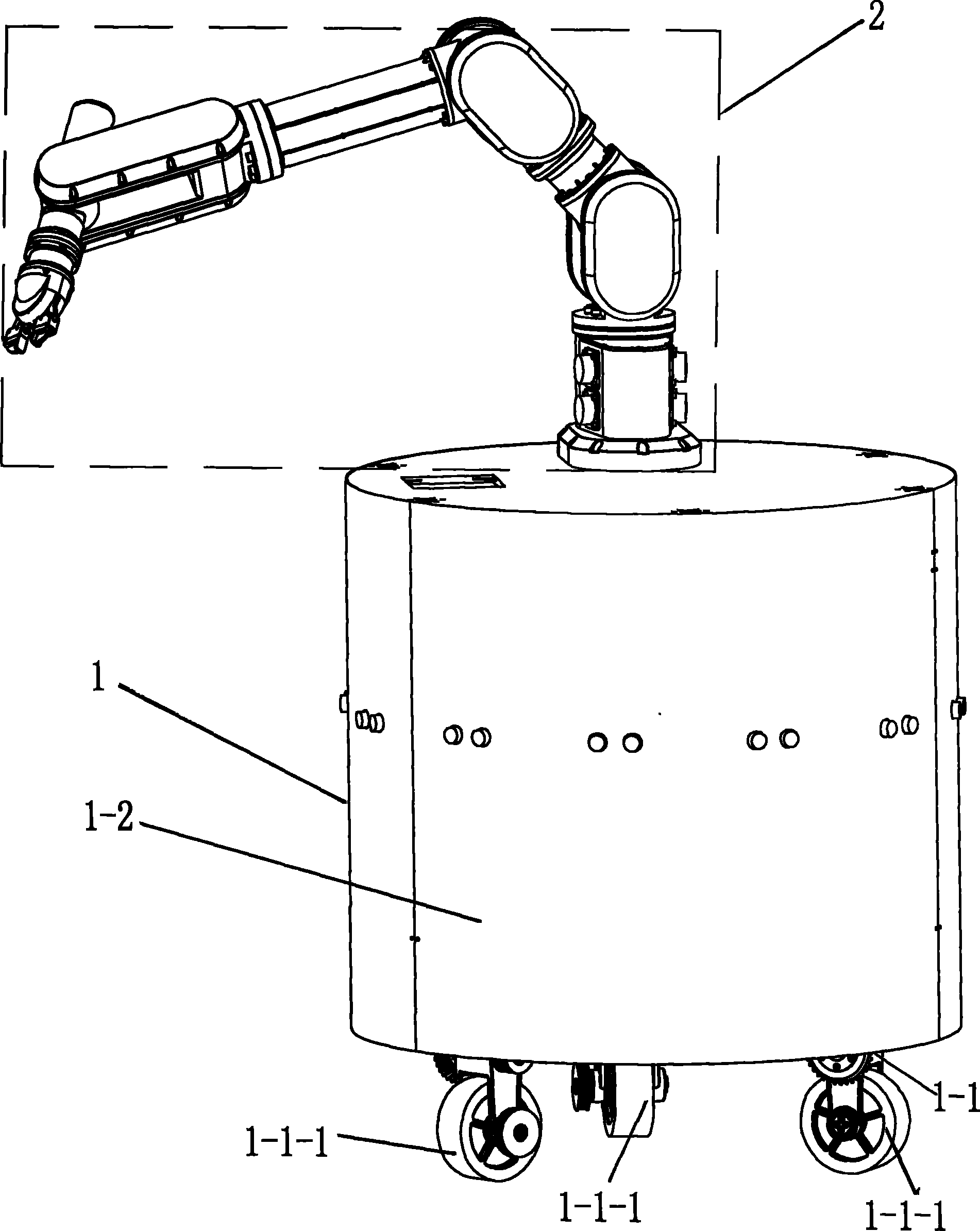
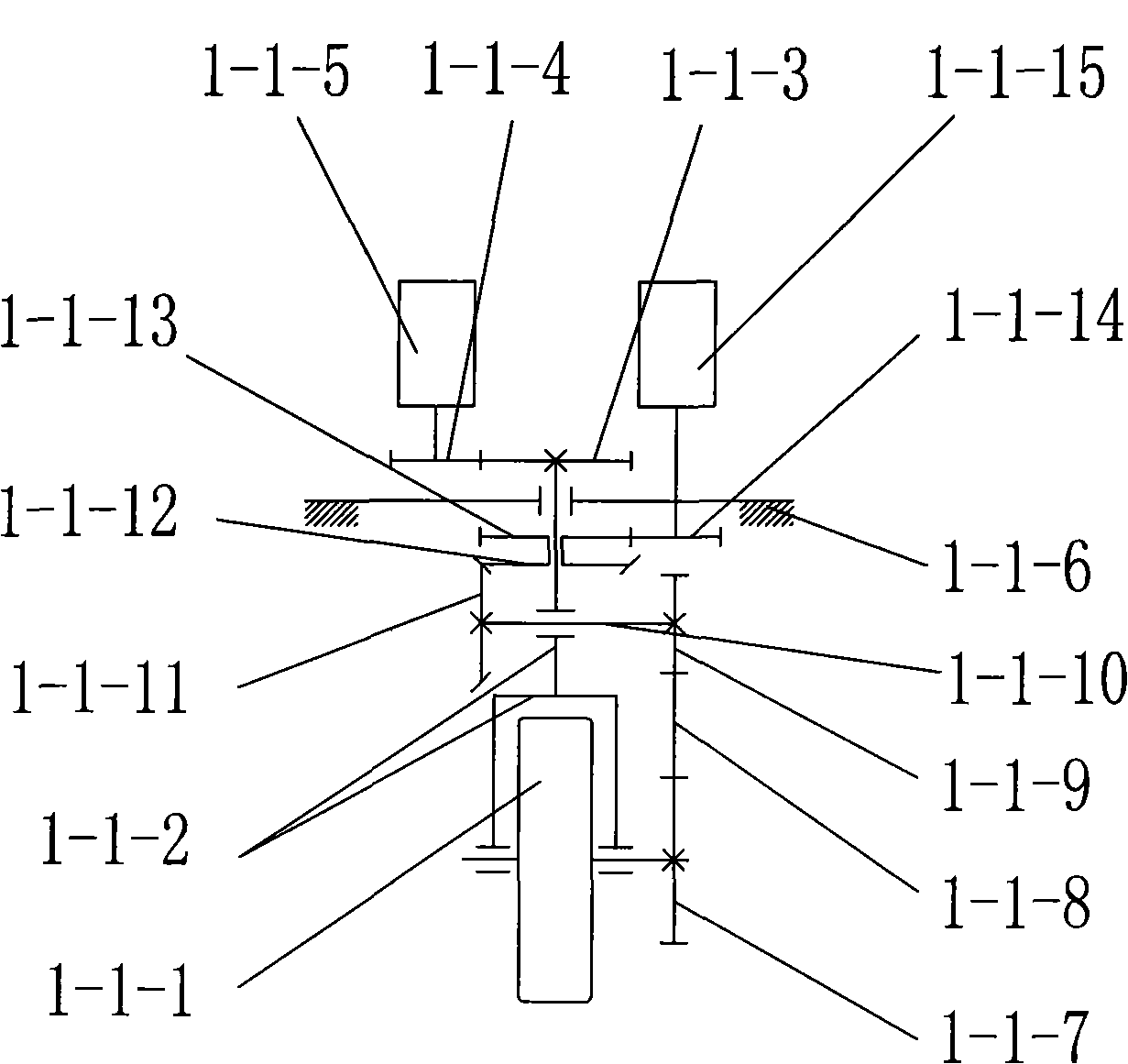
[0008] Specific implementation mode one: as Figure 1~3 As shown, the super-redundant omnidirectional mobile operating arm described in this embodiment is composed of an operating arm main body 2 and an omnidirectional mobile trolley 1. The operating arm main body 2 is installed on the upper end surface of the omnidirectional mobile trolley 1. The omnidirectional Mobile trolley 1 is made up of at least three wheel modules 1-1 and outer casing 1-2, and each wheel module 1-1 is all made up of wheel body 1-1-1, frame 1-1-6, wheel steering device and wheel The wheel steering device is composed of a steering bracket 1-1-2, a first steering spur gear 1-1-3, a second steering spur gear 1-1-4 and a steering motor 1-1-5. The rolling device consists of the first synchronous pulley 1-1-7, the synchronous belt 1-1-8, the second synchronous pulley 1-1-9, the rotating shaft 1-1-10, the first bevel gear 1-1-11, The second bevel gear 1-1-12, the first rolling spur gear 1-1-13, the second rol...
specific Embodiment approach 2
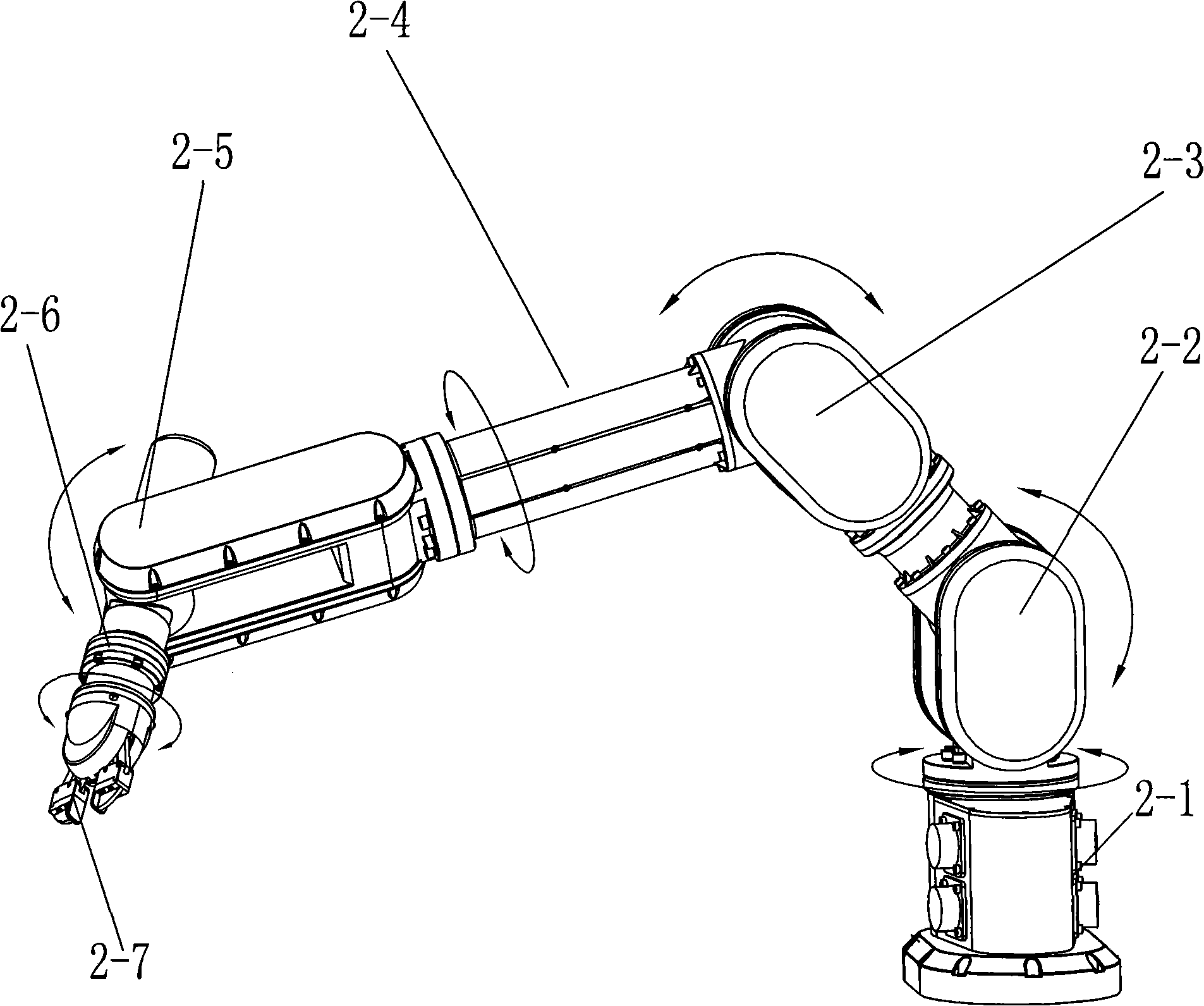
[0010] Specific implementation mode two: as Figure 1~4 As shown, the main body 2 of the operating arm in this embodiment includes a waist joint module 2-1, a shoulder joint module 2-2, an elbow joint module 2-3, a wrist joint first module 2-4, a wrist joint second module 2-5 and Wrist joint three modules 2-6 six joint modules, the waist joint module 2-1, shoulder joint module 2-2, elbow joint module 2-3, wrist joint one module 2-4, wrist joint two module 2-5 Connect with the three wrist modules 2-6 in sequence. The main body 2 of the operating arm described in this embodiment is an operating arm with six degrees of freedom, and the operating arm with six degrees of freedom is installed on the omni-directional mobile trolley 1 with three degrees of freedom to realize a super-redundant full Move the operating arm in azimuth, so that the operating arm has the mobility of the mobile platform and the operability of the operating arm at the same time, with almost infinite work spa...
specific Embodiment approach 3
[0012] Specific implementation mode three: as Figure 1~3 As shown, the main body 2 of the operating arm in this embodiment further includes a jaw 2-7, and the jaw 2-7 is connected to the end of the third module 2-6 of the wrist joint. Other components and connections are the same as those in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More