

Nuclear power plant working robot and control system thereof
A technology for working robots and control systems, applied in manipulators, motor vehicles, steering mechanisms, etc., can solve the problem of not considering robot remote control, and achieve the effect of autonomous control and manual remote control, stable and reliable performance, and reduced risk.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention provides a nuclear power plant operating robot and its control system. The present invention will be further described below with reference to the drawings and specific implementation methods.
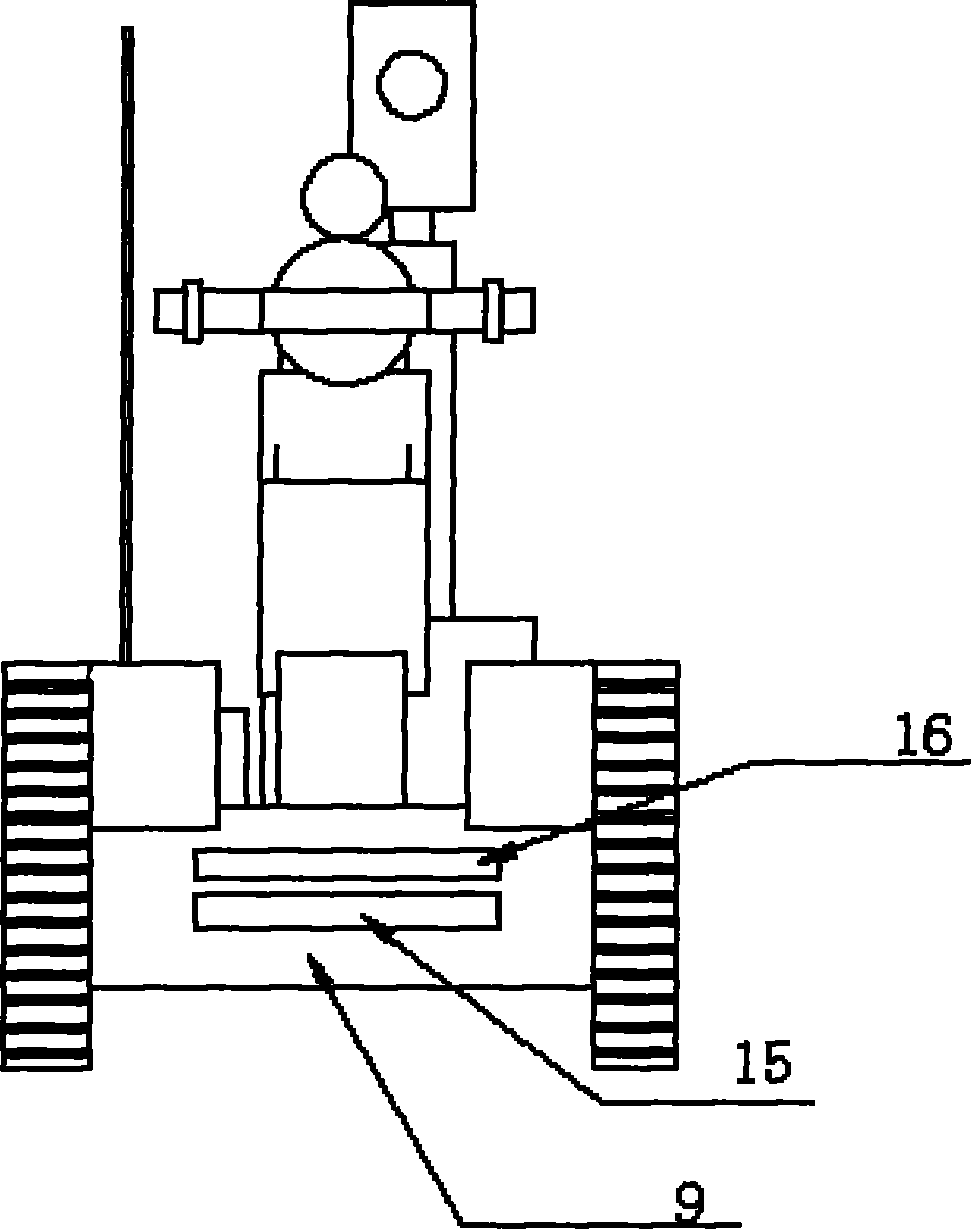
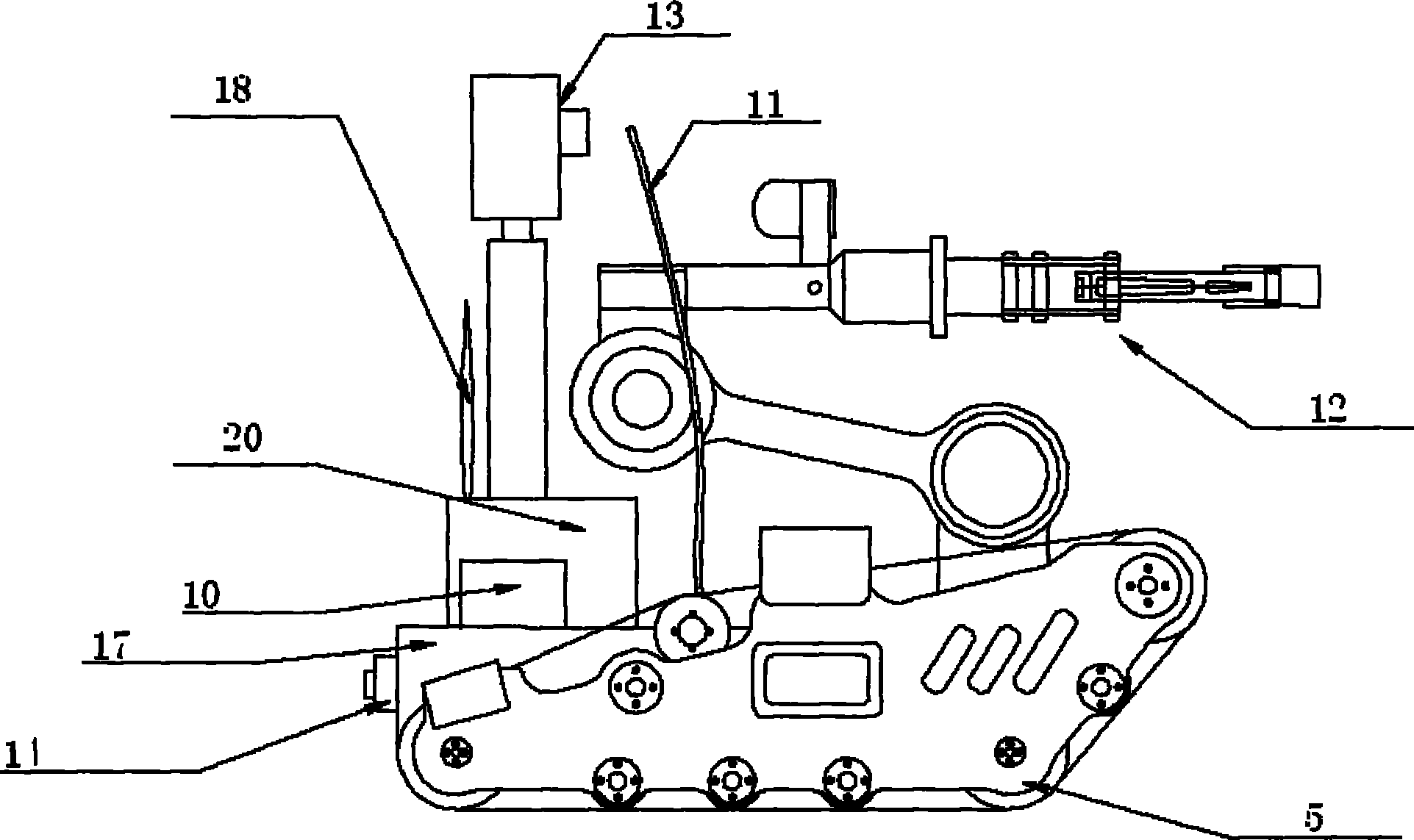
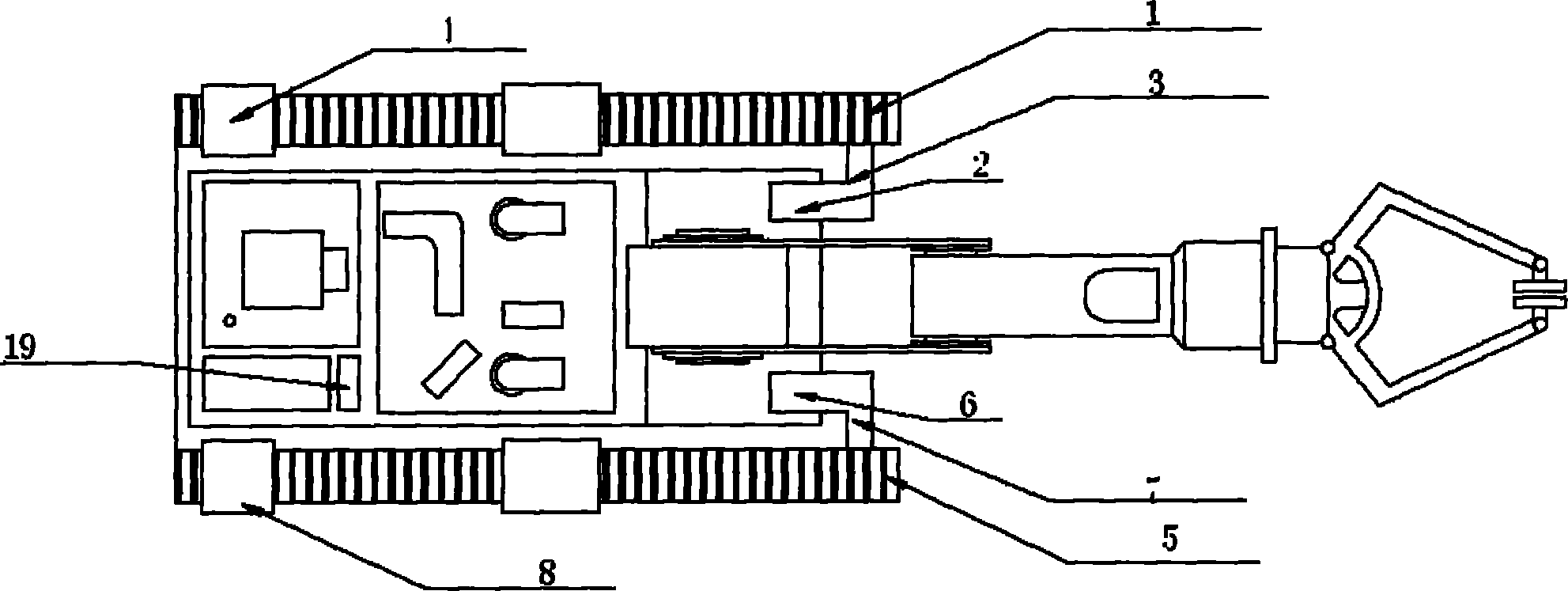
[0039] The nuclear power plant operation robot is a crawler-type mobile manipulator, which is composed of a mobile platform driven by double crawlers and a four-degree-of-freedom manipulator. It can move inside the nuclear power plant and has two control modes: manual remote control and autonomous control; crawler-type mobile The manipulator is powered by a battery, and it is remotely controlled wirelessly or wired.
[0040] The structure of the crawler-type mobile manipulator is: the left crawler-type traveling mechanism 1 is installed on the left side of the chassis 9 through the left crawler drive motor 2 and the left motor output reduction mechanism 3, and the right crawler drive motor is installed on the right side of the chassis 9. 6. The left motor o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More