Piler adaptive fuzzy optimal control method
An adaptive fuzzy and optimal control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of not raising the speed optimization of the stacker, not considering the real-time change of the operating speed, and not considering the stacking Machine speed optimization and other issues to achieve the effect of low cost, convenient implementation, and reduced vibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
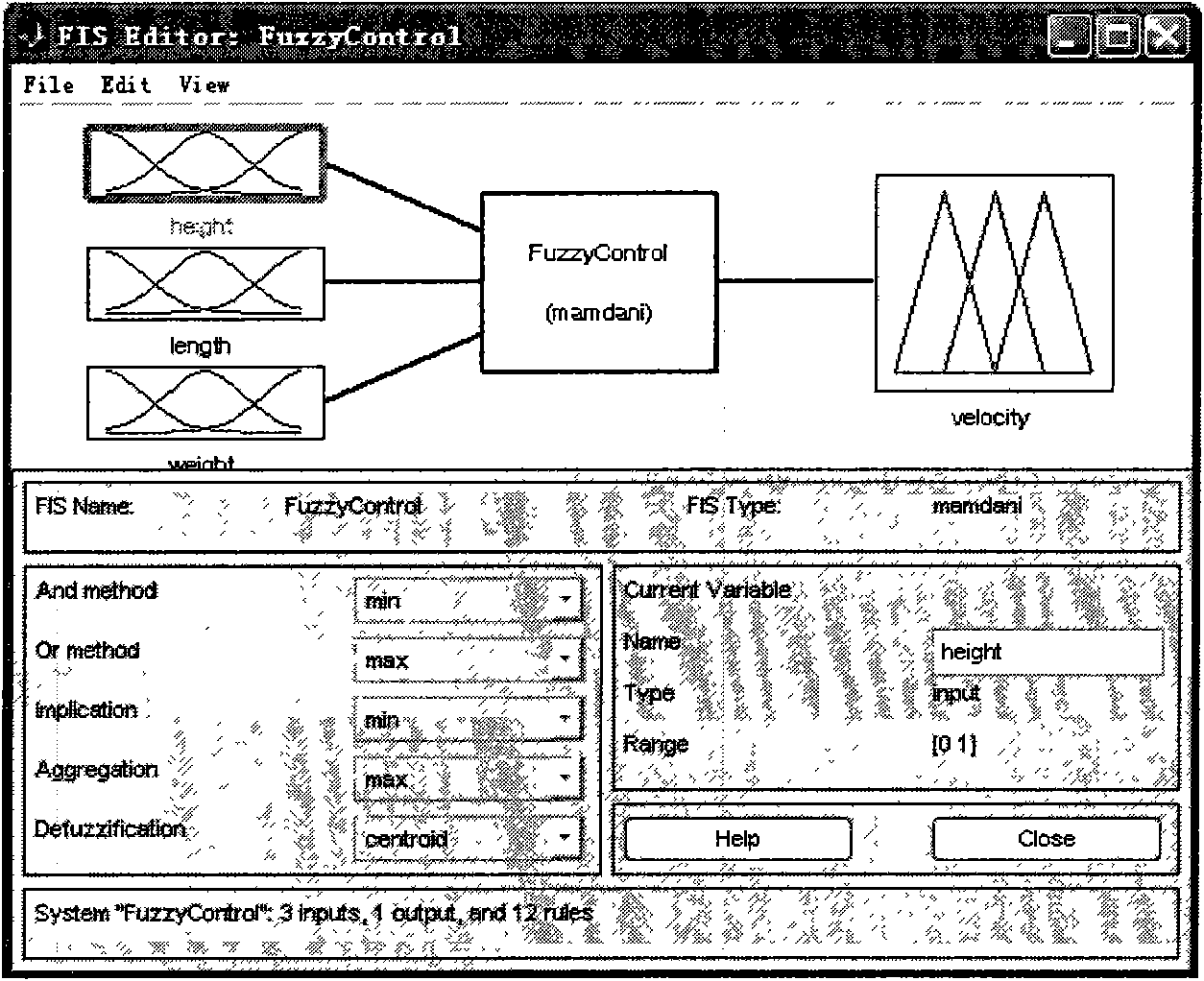
[0026] control figure 1 , fuzzy controller structure design
[0027] We use the fuzzy fuzzy toolbox under Matlab to design the fuzzy control algorithm, the control structure is as follows figure 1 As shown, the input variables of the fuzzy control module include the height of the stacker, the horizontal distance length between the stacker and the target location, and the weight of the cargo on the loading platform. The output variable is the horizontal speed of the stacker.
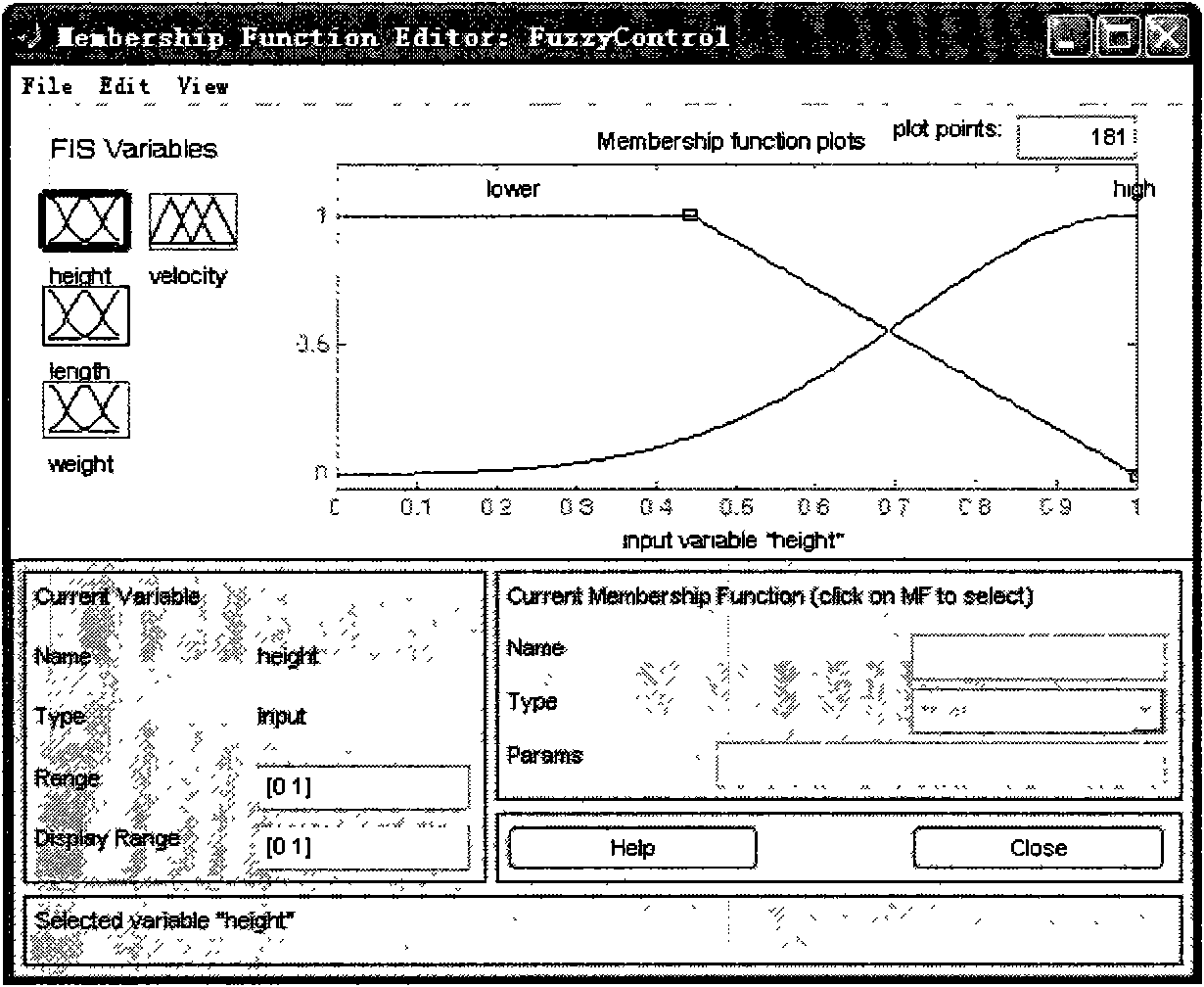
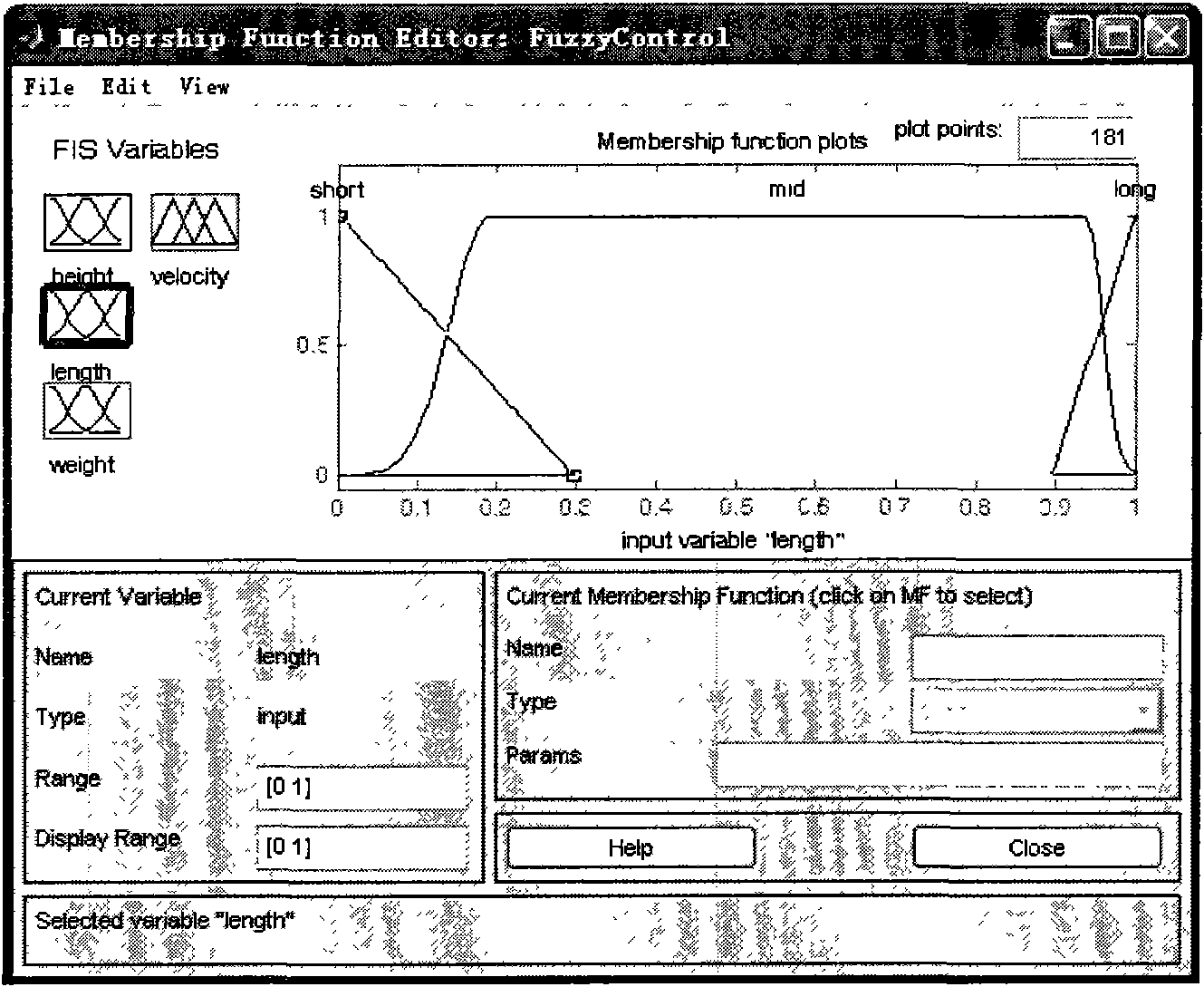
[0028] control Figure 2-5 , fuzzy variable membership function design
[0029] The design of membership function in fuzzy control is the key to whether the output of fuzzy control is smooth or not. Before designing the membership function, we assume that the value ranges of the height of the cargo, the length of the horizontal distance between the stacker and the target location, the weight of the loading platform, and the horizontal speed of the stacker are all 0 ~1 (normalized).
[0030] The membe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



