

Method for digitally driving and detecting multi-gauge head gyroscope
A driving method and gyro technology, which are applied in the direction of gyro effect for speed measurement, gyro/steering sensing equipment, measuring device, etc., can solve the problems of poor stability of the resonant frequency deviation system of the gyro head, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
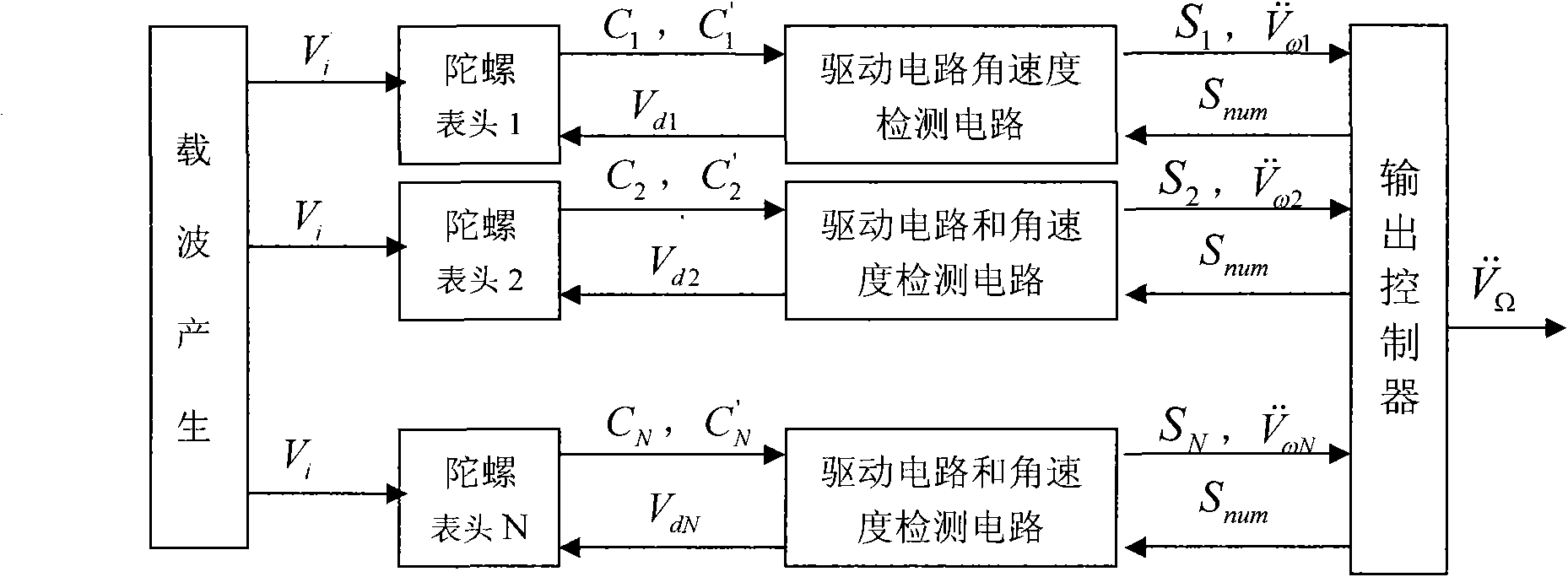
[0059] In this example, the number N of micromechanical gyroscope heads is 3, and the values of n are 1, 2, 3. The resonant angular frequency range of the three gyro heads ω xmin to ω xmax , where ω xmin = 2π·2990rad / s, ω xmax =2π·3010rad / s. The quality factor of the gyroscope is Q x =1000, m x =m y =10 -6 Kg, driving force F 0 =10 -6 N, the carrier frequency is 100KHz. The phase control word of the digital NCO is 32 bits, and the clock frequency is F clk 1MHz. The digital signal processing chip is FPGA. The sampling frequency of A / D and D / A conversion is 1MHz, and the number of sampling bits is 16 bits.
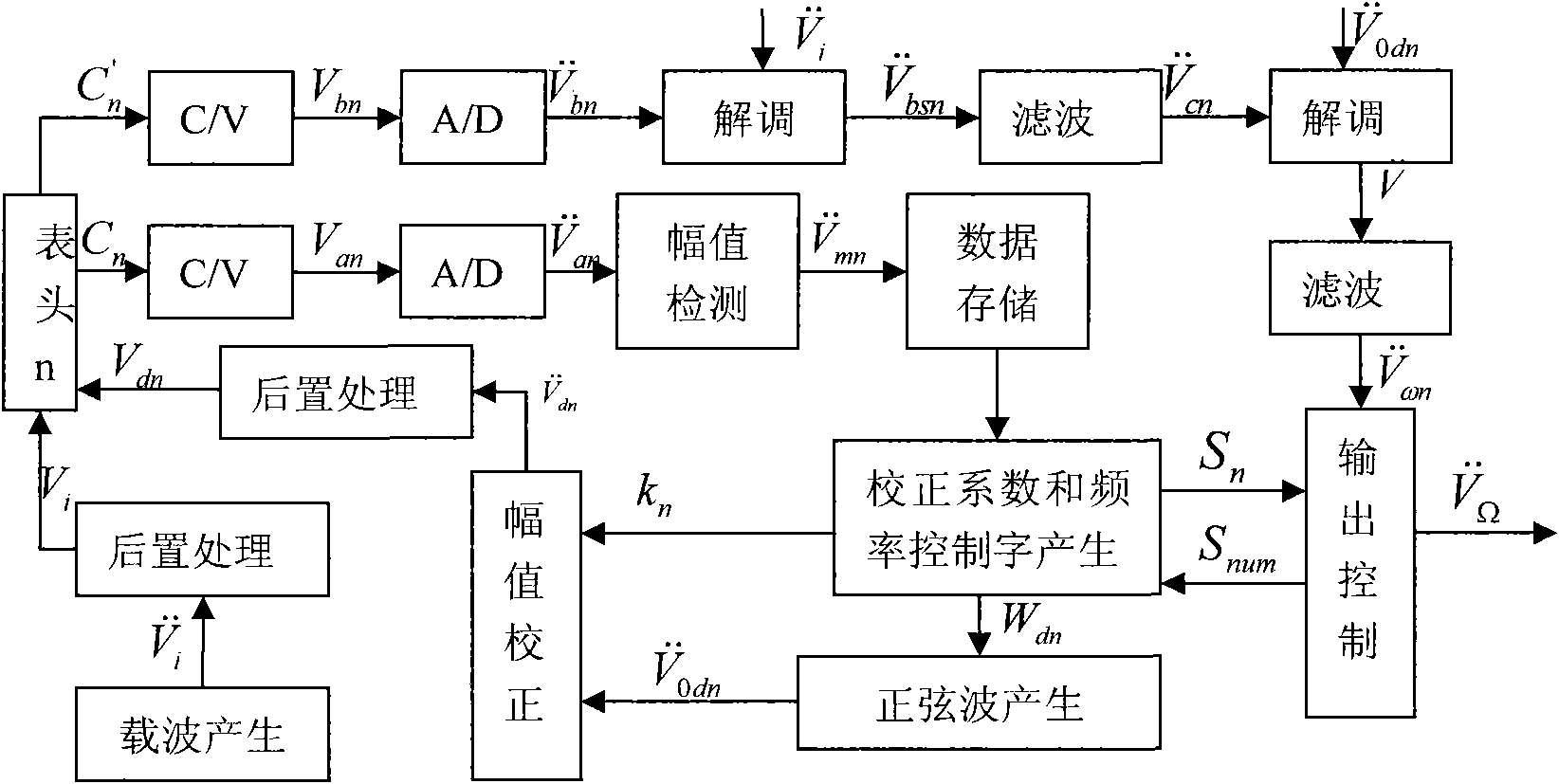
[0060] The specific implementation is divided into two parts: gyro drive and angular velocity detection:
[0061] A multi-meter gyroscope digital driving method, comprising the following steps:
[0062] Step 1: Load the carrier signal V on the gyro head n i and drive signal V dn , the gyro head will vibrate in the X direction after the signal is loaded, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More