

Method for perceiving star catalogue topography by laser stripe information
A technology of laser stripes and information perception, applied in the direction of using optical devices, measuring devices, instruments, etc., can solve the problem of small amount of information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0057] 1) Define the target object
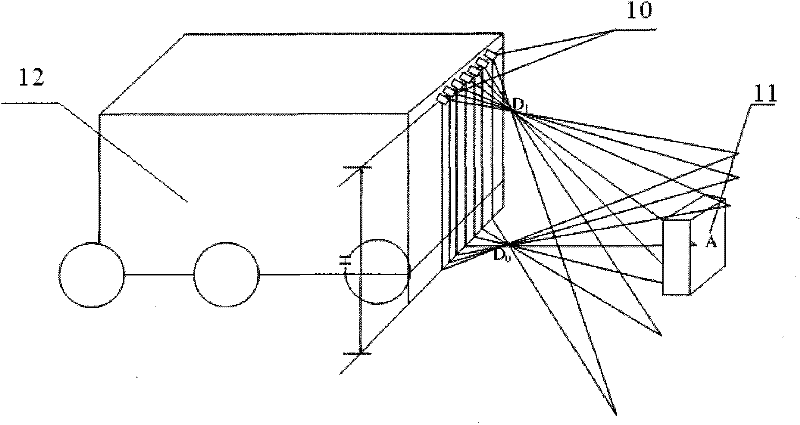
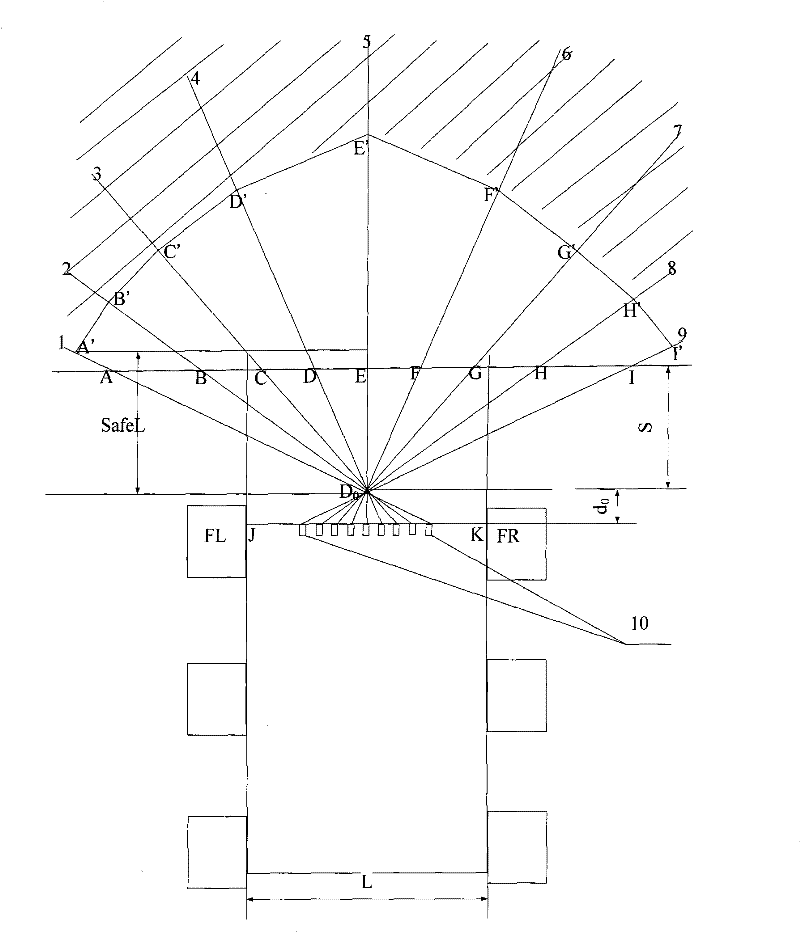
[0058] This method abstracts the star catalog detection robot in the form of a wheeled probe vehicle, and a laser streak device capable of emitting a group of inline lasers is installed at a specific position in front of the probe vehicle. It abstracts that the main hazard of walking on unstructured terrain is the raised height obstacle, which is marked as A.
[0059] The present invention will be further described in detail below in conjunction with the drawings and specific embodiments.
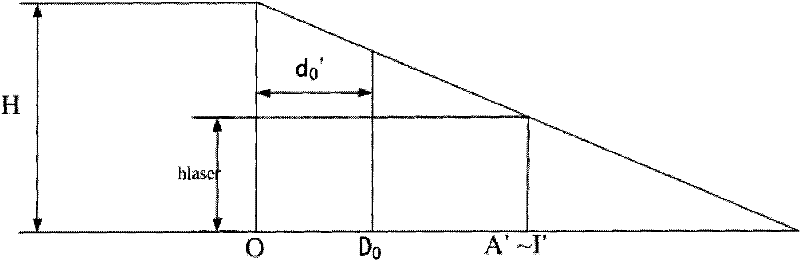
[0060] 2) Place a laser streak meter in front of the rover 12 to emit laser;
[0061] The laser streak device of the present invention is composed of a plurality of lasers 10 capable of emitting one-line laser. The laser line emitted by each laser 10 is located on a light-emitting plane 1-9. The common light-emitting planes 1-9 are The intersection is called the exit ray.
[0062] The status of the laser streak in the rover 12 is as figure 1 As shown, the laser ...
Embodiment 2
[0120] Steps 1) to 3) are the same as in Example 1.
[0121] 4) Obtain and save laser fringe information
[0122] In this embodiment, a laser streak instrument is used to assist binocular vision by using the method of intersecting the lines of optics to obtain laser streak information. The specific operation steps are as follows:
[0123] a) Make the laser stripes in the common field of view of the two cameras;
[0124] b) Turn on and turn off the two images taken by the laser streak instrument to make difference and binarization to obtain two binary images containing only laser stripes;
[0125] c) Where a point on the left image is on the epipolar line of the right image, and at the same time this point is on the laser line of the right image, the intersection of the epipolar line of the right image and the laser line is the point with the same name of the laser point on the left image.
[0126] Using different installation positions and angles, ensure that several laser stripes are lo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More