

Multi-underwater robot semi-physical simulation system and control method thereof
An underwater robot and semi-physical simulation technology, applied in the direction of non-electric variable control, position/direction control, control/regulation system, etc., can solve problems such as the inability to realize multi-robot simulation control, and achieve convenient expansion of sensors and equipment nodes, The effect of high portability and complete verification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
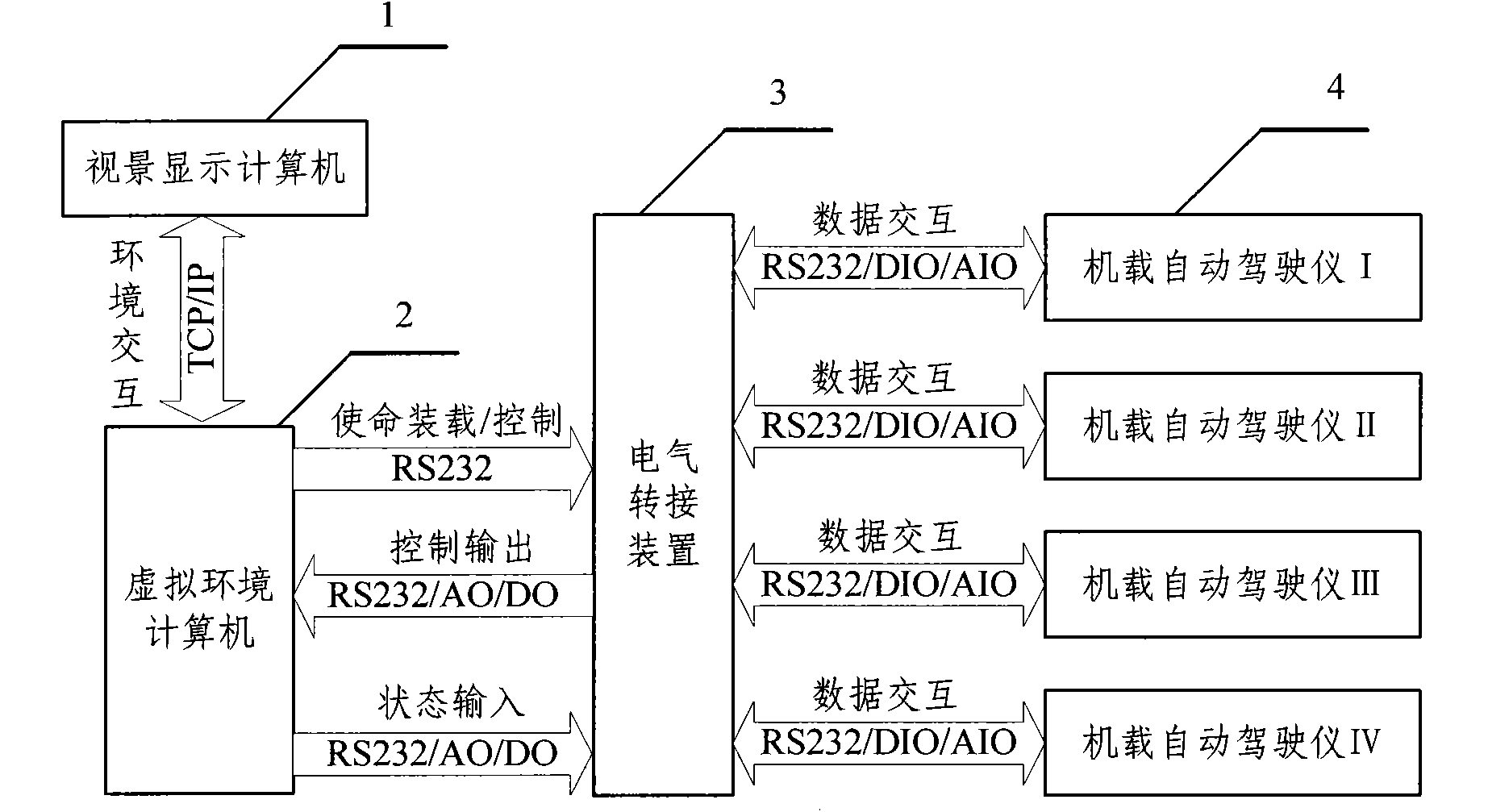
[0043] Such as figure 1 As shown, the multi-underwater robot semi-physical simulation system of the present invention includes: visual display computer 1, virtual environment computer 2, electrical switching device 3 and airborne autopilot 4, wherein: visual display computer 1, and virtual environment The computer 2 is connected to the network to realize the simulation of seabed topography, obstacles, currents and sonar sensor data, and the three-dimensional display of the poses of each underwater robot; the virtual environment computer 2 stores the kinematics, The dynamic model generates various virtual sensor equipment information through model calculation to realize the autonomous closed-loop control of the underwater robot, simultaneously completes the simulation of various fault conditions, and simulates the underwater acoustic channel to realize the forwarding of multi-robot cooperation information; Connecting device 3, the standard cable interface of expansion card of v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More