

Random time delay modeling method of network control system
A technology of network control system and random time delay, applied in general control system, control/regulation system, adaptive control, etc., can solve problems such as difficult abstraction, and achieve the effect of improving operation stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Below in conjunction with accompanying drawing and specific embodiment the present invention will be described in further detail:
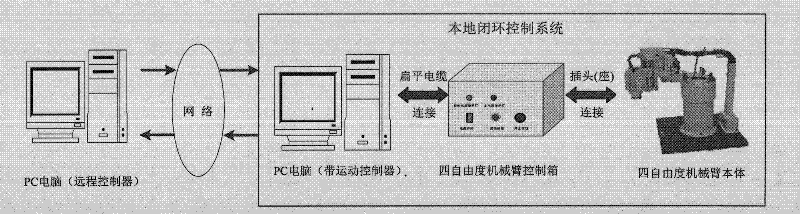
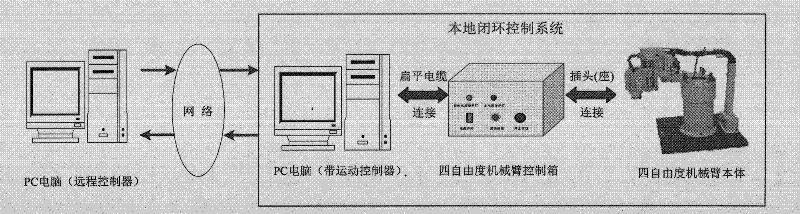
[0020] like figure 1 As shown, the physical diagram of the networked manipulator control system based on the continuous hidden Markov time-delay model, which consists of PC (remote controller), network, PC (with motion controller), four-degree-of-freedom manipulator control box, four DOF robotic arm body. The body of the four-degree-of-freedom manipulator is connected to the control box of the four-degree-of-freedom manipulator through a plug (seat), and the control box of the four-degree-of-freedom manipulator is connected to a PC (with a motion controller) through a flat cable, thus forming a local closed-loop control system. The local closed-loop control system is connected to the PC computer (remote controller) through the network to form a hierarchical network control system.
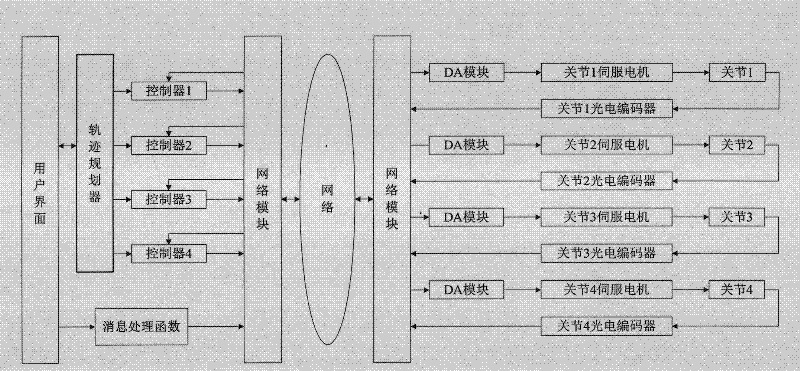
[0021] figure 2 As shown, the body of the four-degree...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More