

Novel four-footed walker having parallel leg structure
A walker, parallel technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems that have not been found in the application of pure parallel mechanism legs, and achieve the effect of simple structure, high motion precision and easy layout
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
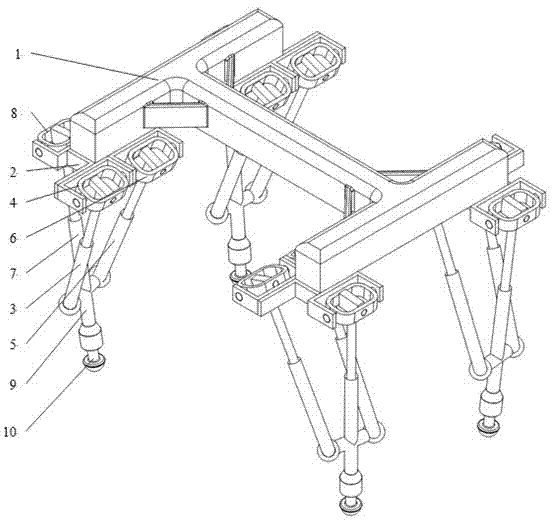
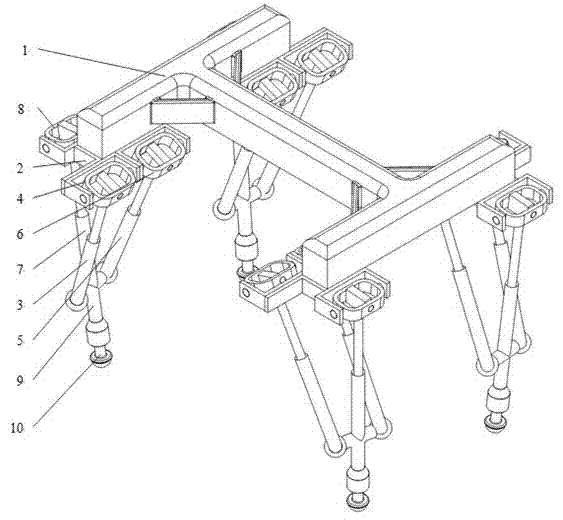
[0017] figure 1 It is a schematic diagram of the structure of the present invention. Such as figure 1 As shown, the present invention mainly includes: a frame 1 and four parallel legs with the same structure.
[0018] Each parallel leg includes a leg frame 2, a first linear actuator 3, a first connector 4, a second linear actuator 5, a second connector 6, a third linear actuator 7, a third connector 8, a T-shaped 9 legs, 10 feet. The leg frame 2 is fixedly connected on the frame, the first connecting member 4 is connected with the leg frame 2 through a hinge, one end of the first linear drive 3 is connected with the first connecting member 4 through a hinge, and the other end is connected with the first connecting member 4 through a hinge. The T-leg 9 is connected; the second connector 6 is connected to the leg frame 2 through a hinge, one...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More