

Self-propelled drilling robot
A robotic and self-propelled technology, applied in the field of robotics, can solve problems such as limited thrust, high manufacturing costs, and high performance requirements of robots, and achieve the effects of eliminating frictional resistance, high drilling efficiency, and low implementation costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the embodiments shown in the accompanying drawings.
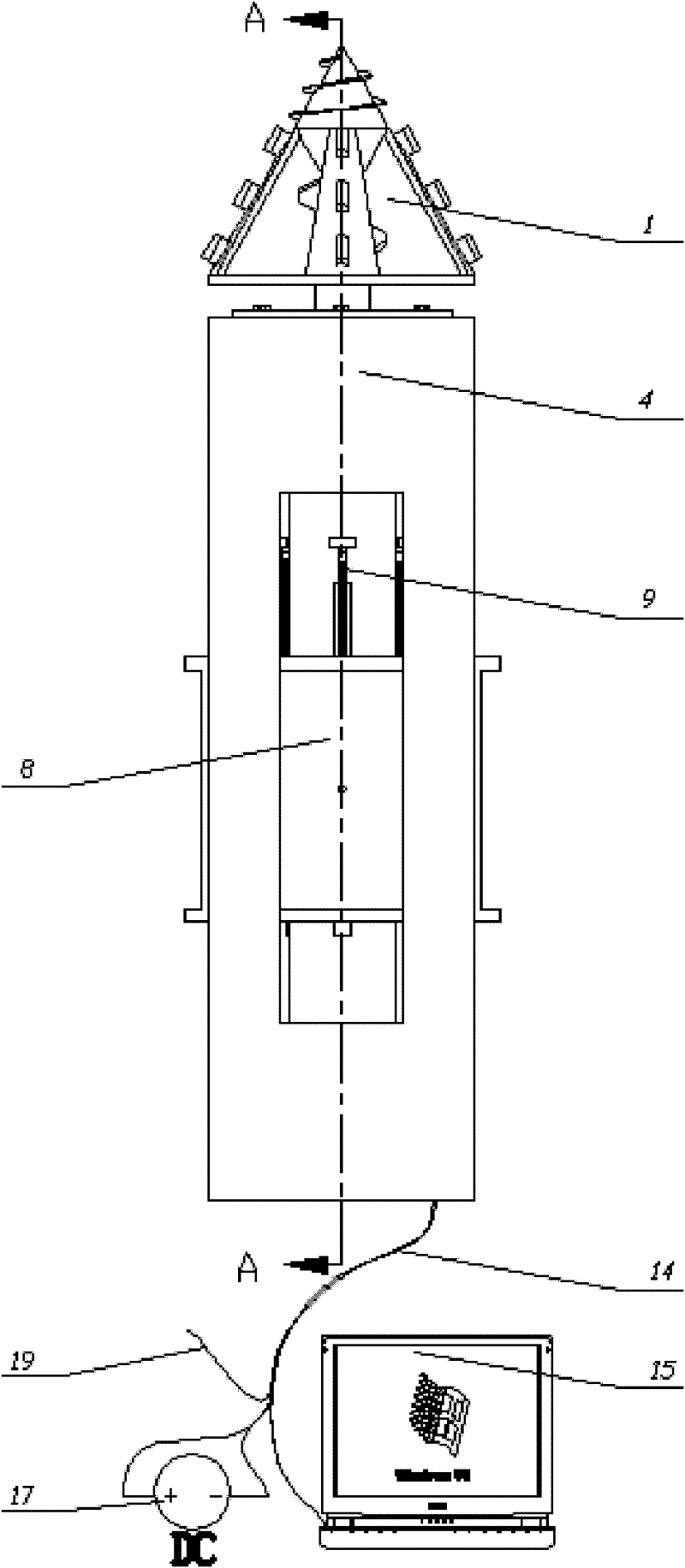
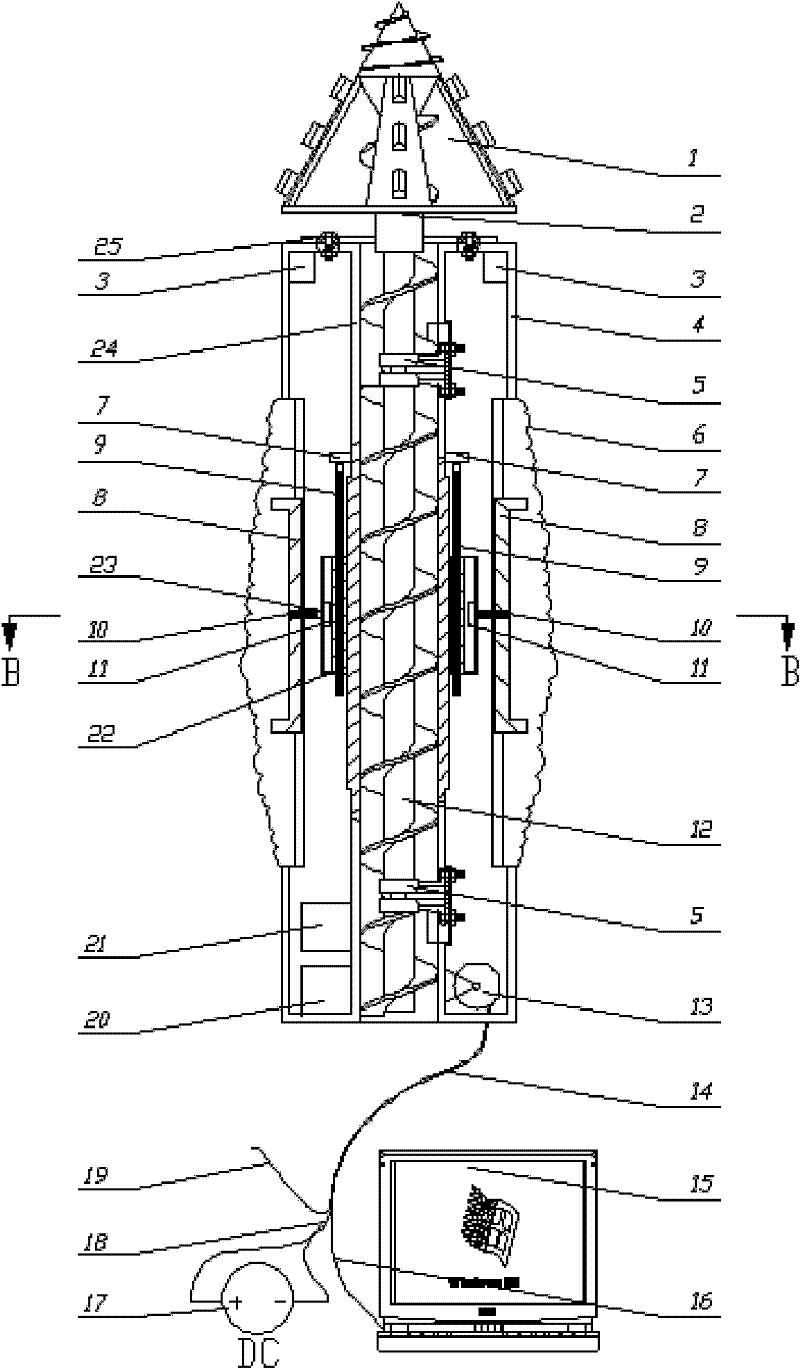
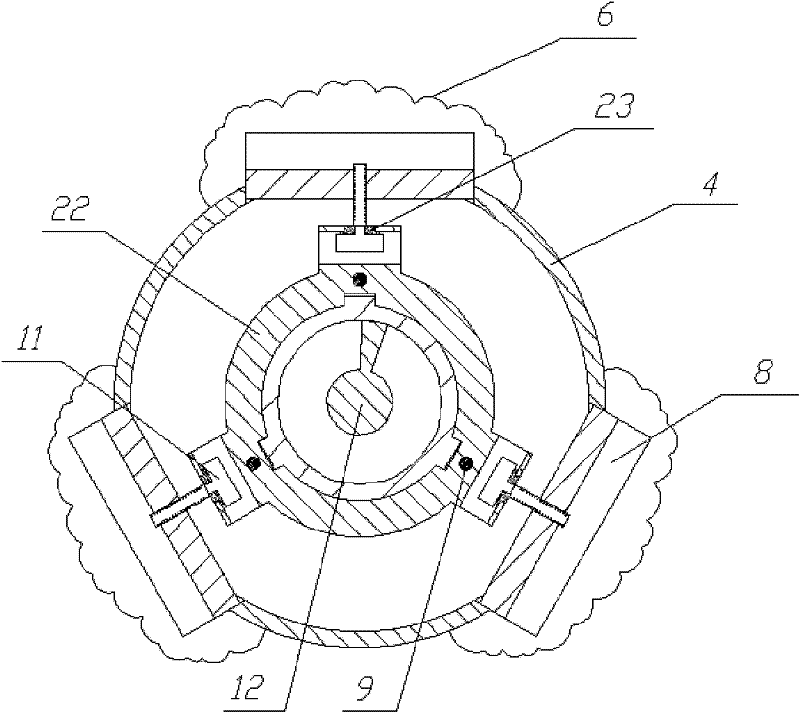
[0032] see Figure 1-7 , the self-propelled ground-drilling robot of this embodiment is mainly composed of four parts: a head 1, a robot body 4, a screw rod 12, and a support foot 8, including a drilling system for cutting and transporting the soil, and providing power for movement. system, a control system that controls the drilling system and the power system.
[0033] Drilling system comprises conical drill bit 1, motor 2 and screw rod 12 three parts. Drill 1 ( Figure 4 ) top is an auger bit, and the rear part adopts a hollow form, and the bit surface is provided with cutting teeth 26, which facilitates the cutting of soil, while the hollow structure is beneficial for soil debris to enter the soil-discharging auger 12, and finally discharge from the fuselage afterbody. The motor 2 has double output shafts, which are respectively connecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More