

Centralized control type soccer robot identification system and identification method for double visual information fusion
A football robot and recognition system technology, applied in the field of centralized control football robot recognition system, can solve the problems that affect image acquisition, real-time processing rate system, affect correction and recognition accuracy, and time-consuming multi-target object recognition, etc. Few types of colors are used, the recognition algorithm is simple and effective, and the effect of reducing the amount of scanning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further described below in conjunction with the accompanying drawings.
[0054] In order to improve the recognition accuracy and real-time performance of the 11-to-11 centralized control football robot vision system in a large field, the embodiment of the present invention provides a centralized control football robot vision system with dual vision sensor information fusion. Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
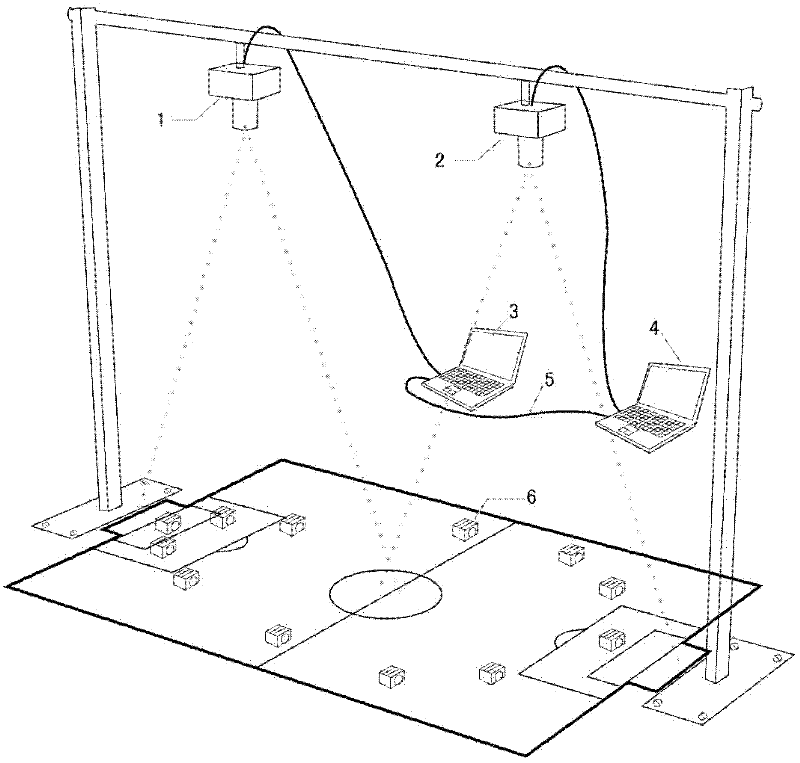
[0055] Such as figure 1 Shown, a kind of centralized control type soccer robot vision system of double vision sensor information fusion, comprises the left vision sensor 1 that is used to photograph the target body of left half field, the right vision sensor 2 that is used to photograph the target body of right half field, is used as The PC 3 at the server end, the PC 4 used as the client, the Ethernet interface line 5 connecting the two PCs, the colo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More