

Navigation control system based on vision and ultrasonic waves
A control system, ultrasonic technology, applied in two-dimensional position/channel control, sound wave re-radiation, radio wave measurement system and other directions, can solve the problems of low real-time performance, low navigation accuracy, inflexible movement, etc. The effect of convenience, high navigation accuracy, and improved flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
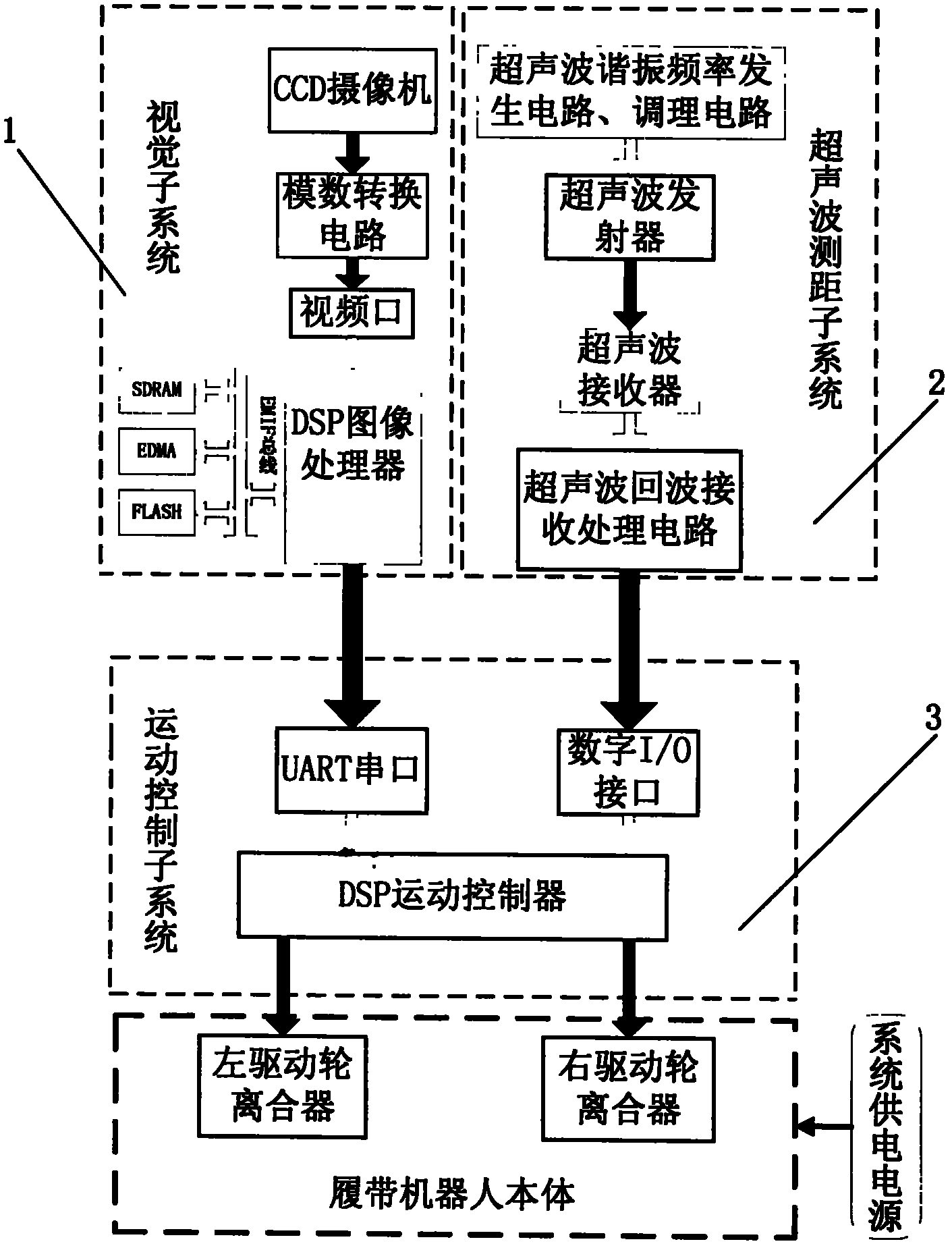
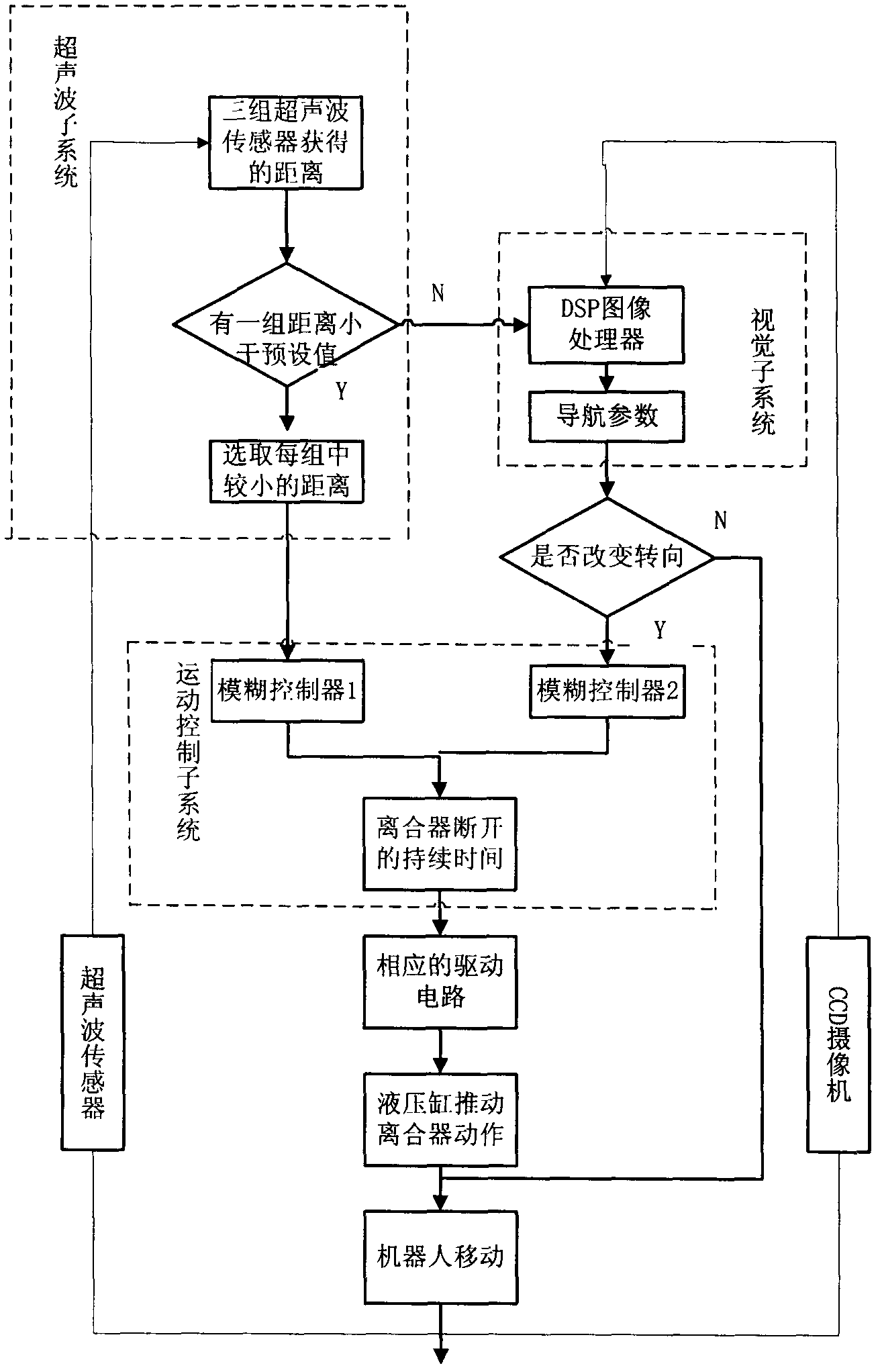
[0018] (1) The working principle of the present invention is: after the crawler robot starts to work, the vision subsystem and the ultrasonic ranging subsystem start to coordinate work simultaneously. During the moving process of the crawler robot, the CCD camera of the vision subsystem (installed directly above the crawler robot) collects video information of the road conditions in front of the robot in real time, and converts the video information into digital signals through the analog-to-digital conversion circuit. Send it to the DSP image processor (using TMS320DM642 chip) for information processing to obtain navigation parameters, and transmit the information obtained by the visual subsystem to the motion control subsystem through the UART serial port of the DSP (using TMS320C2812 chip) motion controller; at the same time The ultrasonic ranging subsystem also works together. The ultrasonic resonance frequency generating circuit and the conditioning circuit generate ultras...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More