

Method for constructing neutral network generalized inverse adaptive controller of three-motor driving system
A driving system and neural network technology, applied in biological neural network models, controlling multiple AC motors, etc., can solve the problems of poor dynamic performance, large overshoot, slow start-up speed, etc., and achieve excellent speed and tension coordinated control. performance, solving decoupling control problems, improving the effect of startup speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
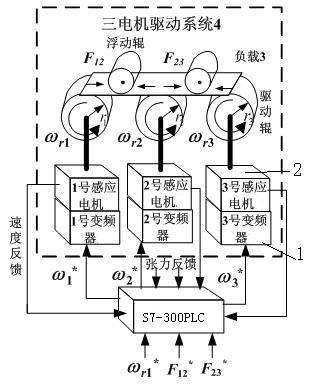
[0025] Such as figure 1 As shown, a three-motor drive system 4 is formed. The three-motor drive system 4 includes three AC asynchronous induction motors 2 and three frequency converters 1, and No. After being decelerated by the reducer, the corresponding three driving rollers are respectively driven to run. The three driving rollers are connected by a belt. There are floating rollers on the belt. Due to the tension of the floating rollers, the belt will generate tension F 12 , F 23 , so that the system can run with load 3. Three frequency converters 1 respectively drive three AC asynchronous induction motors 2 to drive loads 3 , thus forming a three-motor drive system 4 . Considering that the rotating speed of each induction motor 2 in the three-motor drive system 4 and the tension force of the belt are interrelated and influenced, the present invention adopts the mode of master-slave control, suppose No. 1 induction motor to be active motor, its rotating speed ω r1 and be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More