

Combined type bionic quadruped robot controller
A quadruped robot and controller technology, applied in the direction of two-dimensional position/channel control, etc., can solve problems such as inability to complete multi-motor real-time coordinated control, inability to guarantee real-time performance of the control system, and large load on the main control chip, etc., to achieve guaranteed Fluency, high stability, and the effect of improving adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The technical solutions of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. The following examples are not intended to limit the present invention.
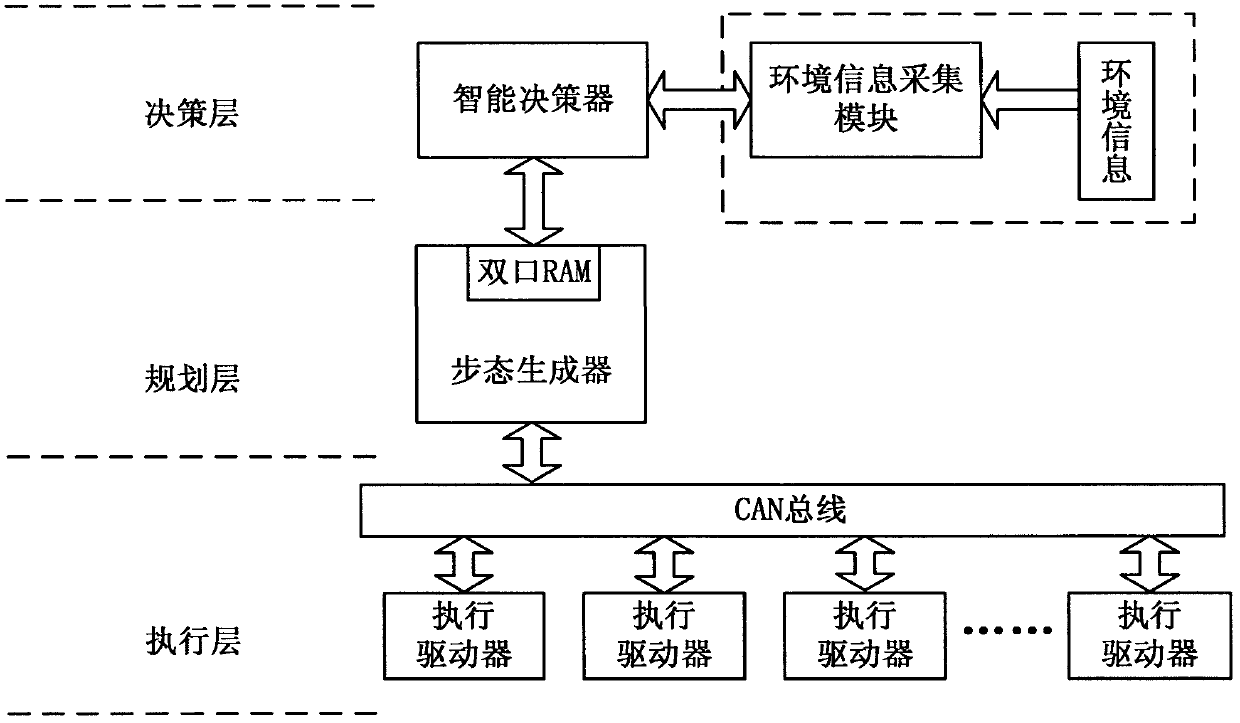
[0019] figure 1 Shown is the composite bionic quadruped robot controller of the present invention, which is completely constructed according to the neural network for vertebrate motion control. The movement of most animals is realized through the control of the nervous system. The general animal nervous system mainly includes the brain, lower nerve centers and motor nerves. Among them, the brain constitutes the high-level nerve center of the organism, which coordinates and processes various sensory information feedback and realizes the overall regulation of the biological movement; the low-level nerve center realizes the rhythmic movement of the animal through self-excitation; the motor nerve is in charge of the contraction of muscle fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More