

Self-balanced parallel movement simulator of two-freedom degree closed loop
A motion simulator and self-balancing technology, which is applied to instruments, teaching models, educational appliances, etc., can solve the problems of poor dynamic performance, low carrying capacity, and large body size, and achieve stable performance, large working space, and low occupancy. small size effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
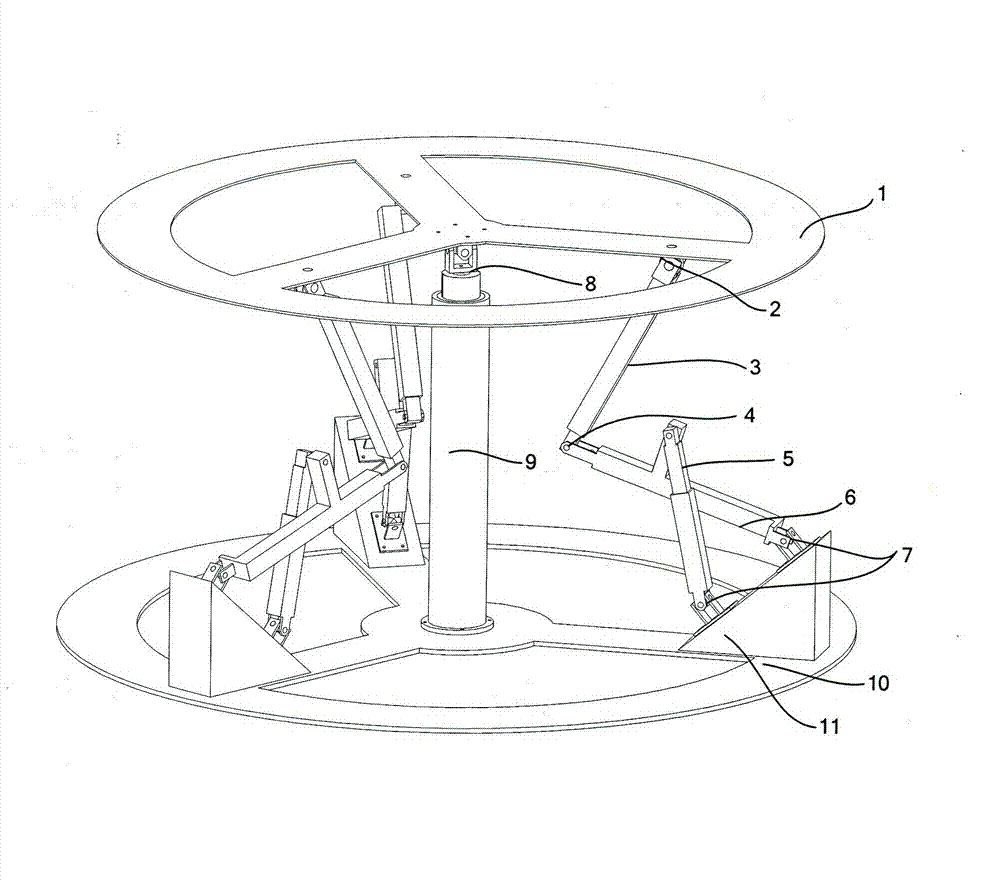
[0021] exist figure 1 In the schematic diagram of the structure of the self-balancing parallel motion simulator with two degrees of freedom and closed loop shown, the three SRU drive branches with the same structure are evenly distributed, and the fixed platform 10 is provided with three triangular bases 11 arranged in an equilateral triangle, each group of 2 The first universal hinge 7 is symmetrically fixed up and down on the above-mentioned triangular base, wherein the first universal hinge fixed on the top is connected with the rotating pair 4 through the lower connecting rod 6, and the first universal hinge fixed on the bottom is connected with the electric cylinder The tail of 5 is connected, the telescopic rod of the electric cylinder is connected with the above-mentioned lower connecting rod, the above-mentioned rotating pair is connected with the ball joint 2 through the upper connecting rod 3, the ball joint is connected with the moving platform 1, and the centers of ...
Embodiment 2
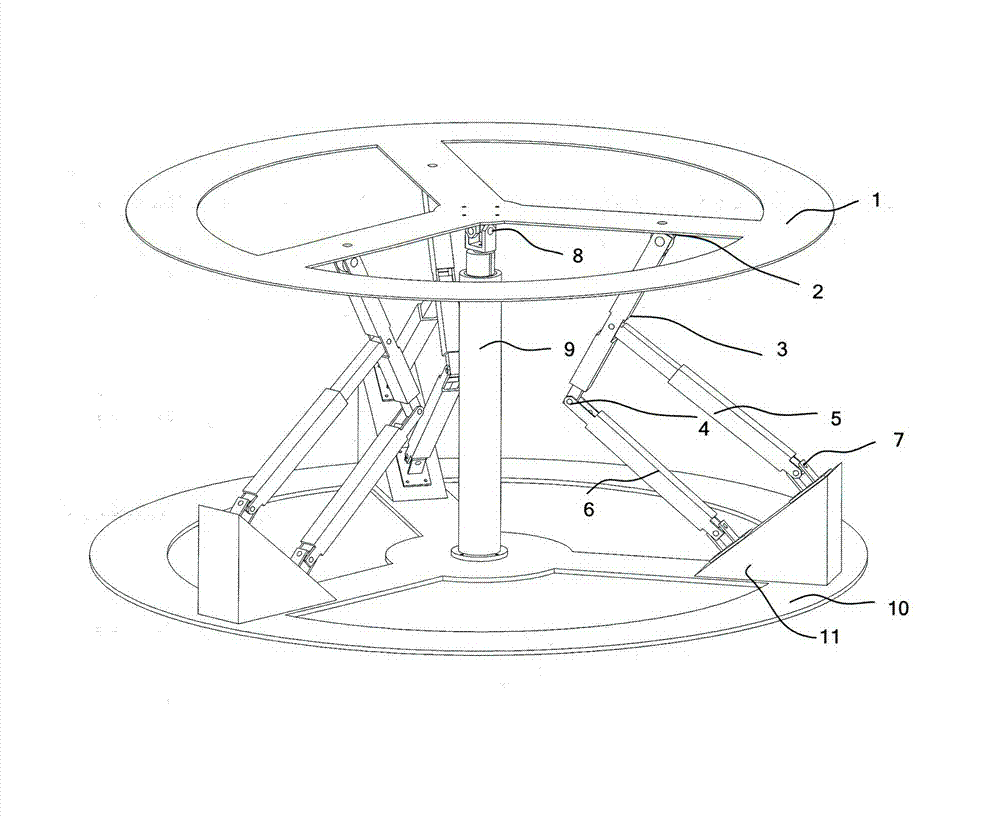
[0023] exist image 3 In the schematic structural diagram of the two-degree-of-freedom self-balancing parallel motion simulator with closed loop shown, each group of two first universal joints 7 of each SRU drive branch is symmetrically fixed up and down on the triangular base 11 of the fixed platform, Among them, the first universal hinge fixed on the top is connected with the tail of the electric cylinder 5, the telescopic rod of the electric cylinder is connected with the upper connecting rod 3, and the first universal hinge fixed below is connected with the above-mentioned rotating pair through the lower connecting rod 6 . Other components and connections are the same as in Embodiment 1.
Embodiment 3
[0025] exist Figure 4 In the schematic structural diagram of the two-degree-of-freedom self-balancing parallel motion simulator with closed-loop shown, each group of two first universal joints 7 of each SRU drive branch is fixed on the fixed platform 10 symmetrically inside and outside, in which The first universal hinge inside is connected with the revolving pair 4 through the lower connecting rod 6, and the first universal hinge fixed outside is connected with the afterbody of the electric cylinder 5, and the telescopic rod of the electric cylinder is connected with the upper connecting rod 3. Other components and connections are the same as in Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More