

Novel six-foot robot
A hexapod robot and robot technology, applied in the field of bionic robots, can solve the problems of low integration of robots, lack of self-state perception ability, weak environmental perception ability of hexapod robot, etc., and achieve a good external environment and self-balanced perception ability , light weight and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
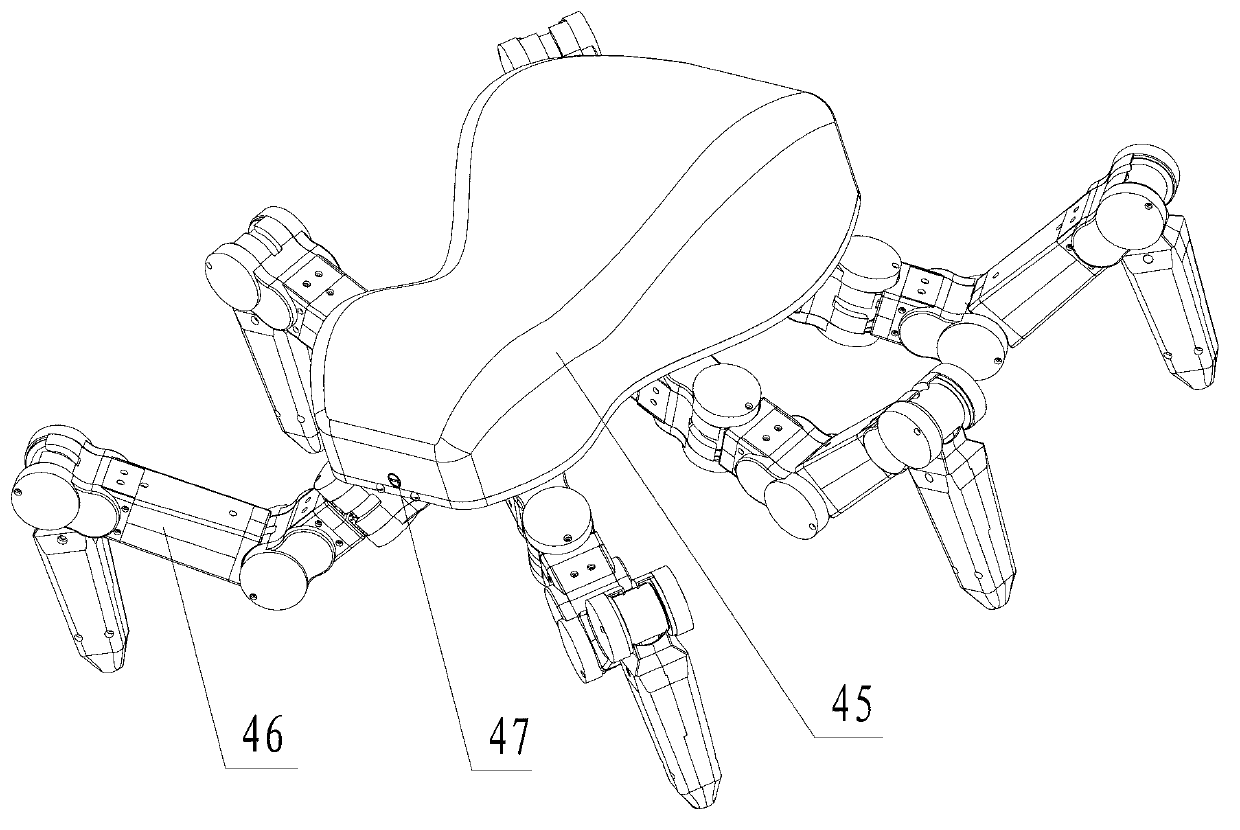
[0013] Specific implementation mode one: combine figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Image 6 with Figure 8 Describe this embodiment, a new type of hexapod robot described in this embodiment, the robot includes a torso 45, a mechanical leg 46, a sensing system and a control system, and there are 6 mechanical legs 46 in total, and the 6 mechanical legs 46 are evenly distributed. Distributed on both sides of the lower end of the torso 45 and fixedly connected to the lower end of the torso 45, each mechanical leg 46 is composed of a connecting piece 5, a trunk-base joint 6, a base beam 43, and a base-femoral joint 8 , femoral beam 10, femoral-tibial joint 12 and tibial beam 44 are sequentially connected to form;
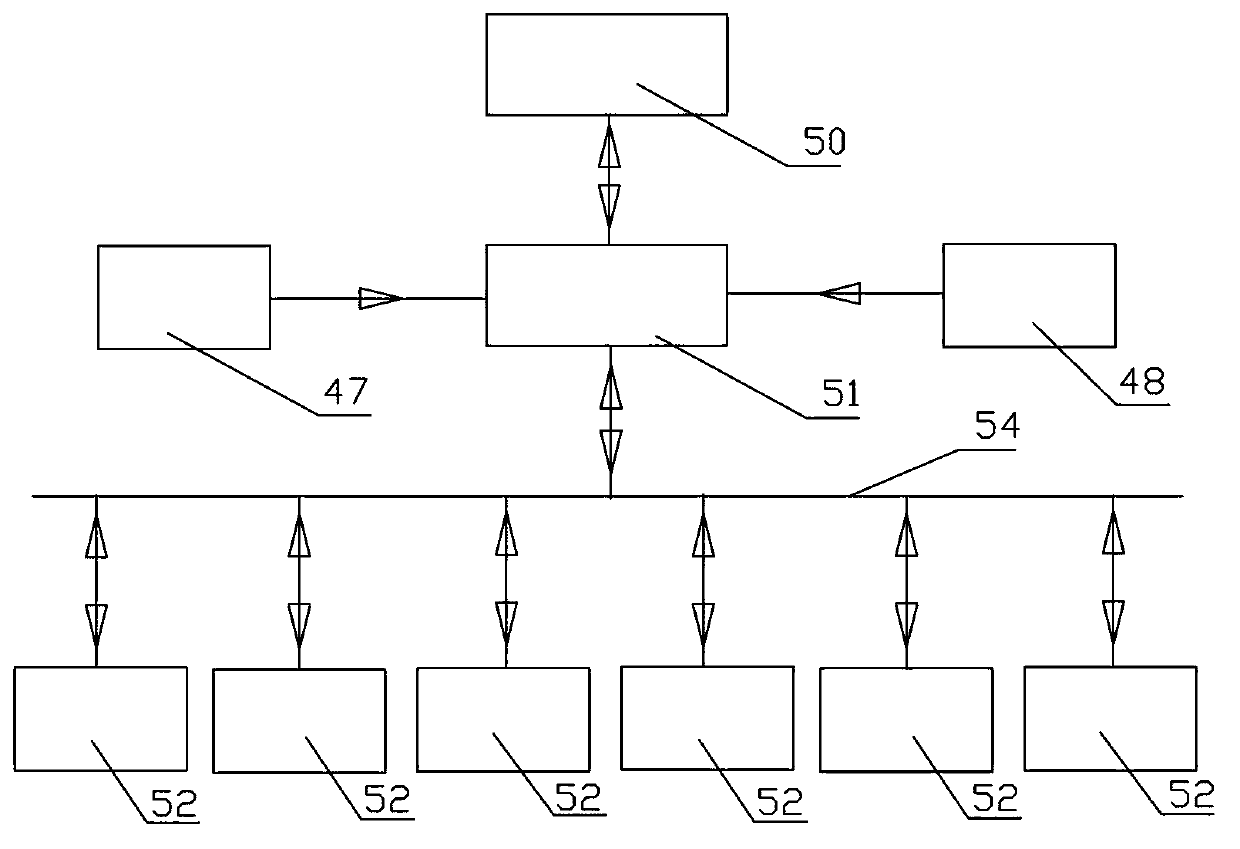
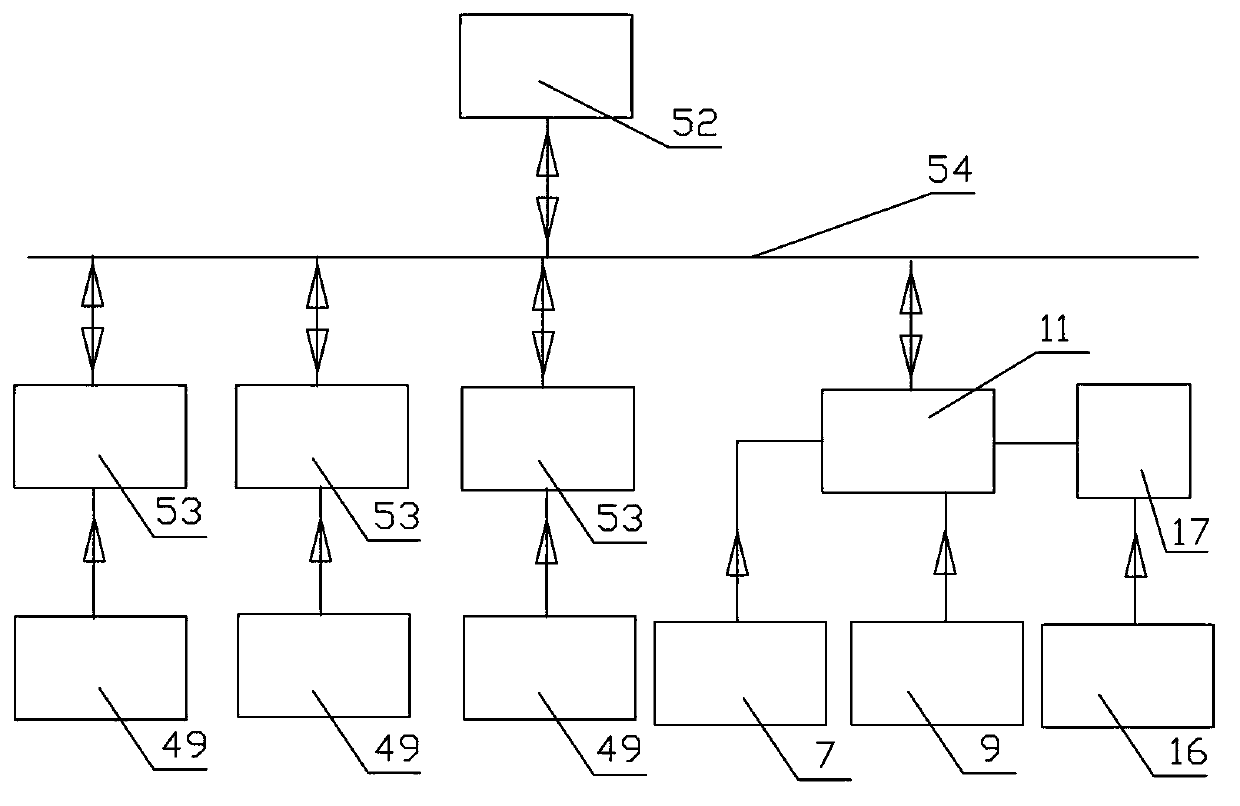
[0014] Described sensing system comprises vision sensor 47, pose sensor 48, the first one-dimensional torque sensor 7, the second one-dimensional torque sensor 9, three-dimensional force sensor 16, joint angle position sensor 49, data acquis...
specific Embodiment approach 2
[0017] Specific implementation mode two: combination Figure 4 , Figure 5 with Image 6 Describe this embodiment, the robot described in this embodiment also includes a base joint packaging shell 1, a plurality of wire retaining plates 2, a thigh joint packing shell 3 and a tibia joint packing shell 4, and the base joint packing shell 1 is arranged on the torso - On the base joint 6, the femoral joint packaging shell 3 is arranged on the base joint-femoral joint 8, the tibial joint packaging shell 4 is arranged on the femur-tibial joint 12, the trunk-base joint 6, the base joint - Both ends of the femoral joint 8 and the femoral-tibial joint 12 are respectively provided with a wire retaining plate 2 , which can effectively protect the internal structures of the mechanical leg 46 , and other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0018] Specific implementation mode three: combination Figure 10 To illustrate this embodiment, six interface boards 55 are fixedly arranged in the torso 45 of this embodiment, and each interface board 55 is provided with a single-leg control module 52 and 3 corresponding to one of the mechanical legs 46. The joint drivers 53 are arranged in this way, so that the overall structure of the hexapod robot is more reasonable and compact, which is convenient for maintenance and use. The other components and connections are the same as those in the first embodiment.
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
| Length | aaaaa | aaaaa |
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More