

Embedded type system of outer skeleton robot
An exoskeleton robot and human body technology, applied in the direction of manipulators, program control manipulators, manufacturing tools, etc., can solve the problems that cannot meet the wireless data transmission requirements of exoskeleton robots and human sensor signal processing systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
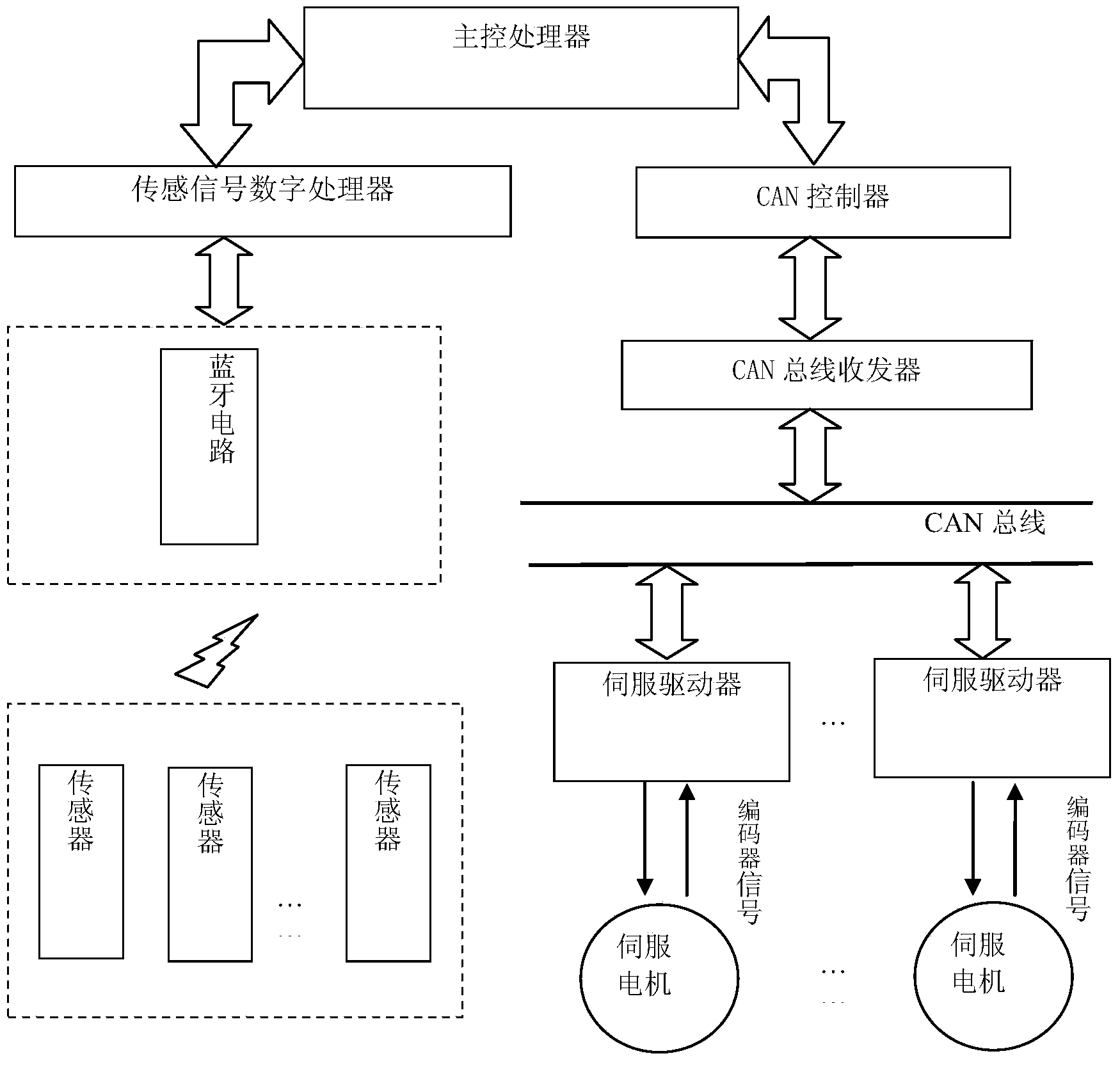
[0034] Such as figure 1 As shown, this embodiment includes: a main control processor, a sensor signal digital processor DSP, a bluetooth circuit, several sensors, a CAN controller, a CAN bus transceiver and an execution drive circuit, wherein: the main control processor is connected with the sensor The signal digital processor and the CAN controller communicate with each other, the input and output terminals of the Bluetooth circuit communicate with each sensor and the sensor signal digital processor respectively, and the receiving end and the transmitting end of the CAN bus transceiver communicate with the CAN bus and the CAN controller respectively. The device is connected, and the execution drive circuit is connected to the CAN bus;
[0035] The main control processor of the present embodiment comprises embedded main control microprocessor, peripheral interface, watchdog, voice alarm, power management, battery charging circuit, wherein, embedded main control microprocessor ...
Embodiment 2
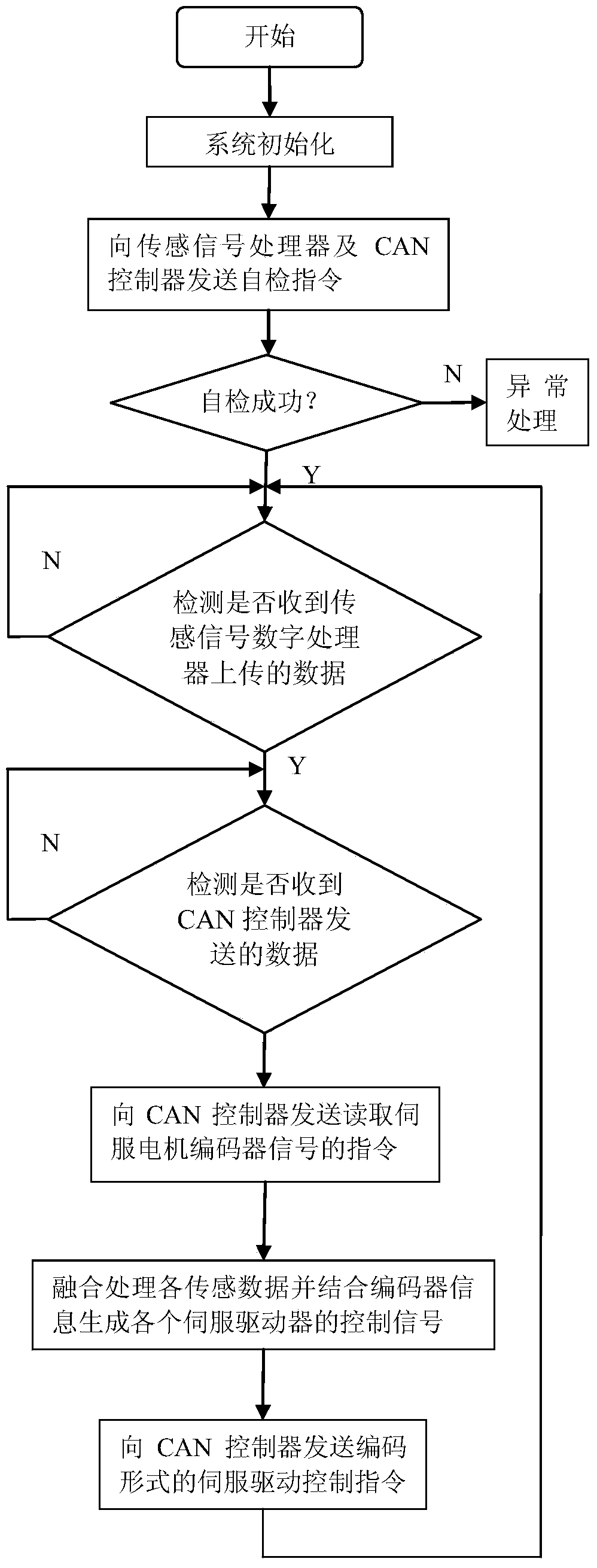
[0044] This embodiment is based on the control method of Embodiment 1. Each slave circuit of the Bluetooth circuit collects the sensing information of the corresponding sensor, and the sensing information is transmitted to the sensing signal digital processor through the main circuit, and the sensing signal digital processor passes the MEMS The acceleration sensing data of the human hip, lower limbs, thighs, and feet acquired by the gyroscope and the acceleration sensor, and the angular velocity information of the lower limbs, thighs, and feet are used to obtain the angle values of the human hip joints, lower limbs knee joints, and ankle joints. The angle value and the pressure signal obtained by the plantar pressure sensor and contact force sensor are transmitted to the main control processor, and the main control processor fuses the angle value and pressure signal to obtain the zero moment point (ZMP, Zero Moment Point) of the human body as an exoskeleton robot The referenc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More