

Foldable six degrees of freedom light type operating arm with joint axis orthogonal relation
A degree of freedom, manipulator technology, applied in the direction of claw arm, manufacturing tools, manipulators, etc., can solve the problems of industrial manipulators such as large load capacity, heavy operation, complex control system, etc., to achieve optimal operational flexibility, simple overall structure, good dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The foldable six-degree-of-freedom light-duty manipulator arm with joint axes orthogonal to the present invention will be described in detail below with reference to the embodiments and the accompanying drawings.
[0024] The foldable six-degree-of-freedom light-duty operating arm with joint axes orthogonal to the present invention provides a kind of A lightweight manipulator arm robot with a smaller size and lower mass, enabling it to be mounted on a mobile robotic platform or wheeled motor vehicle.
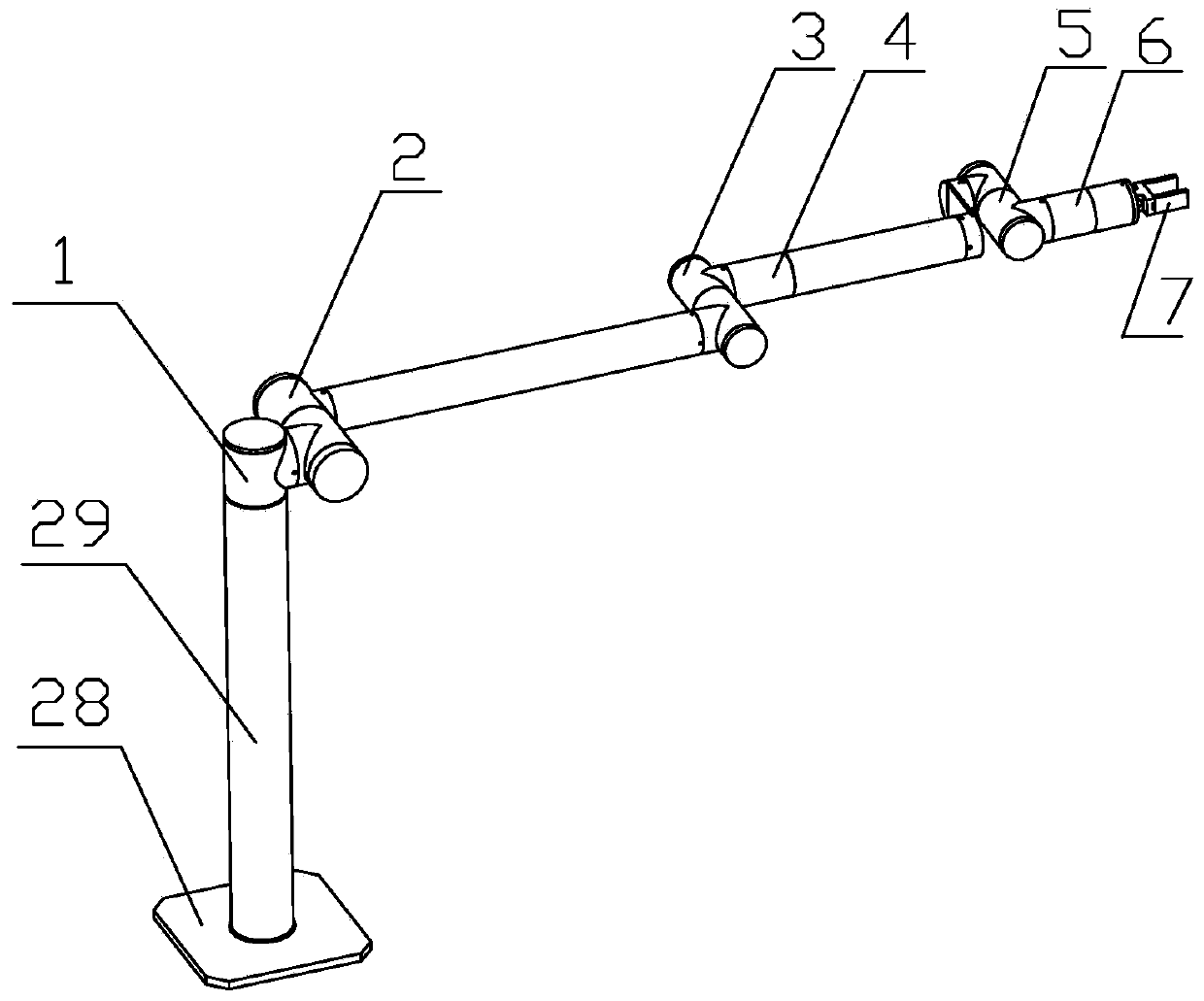
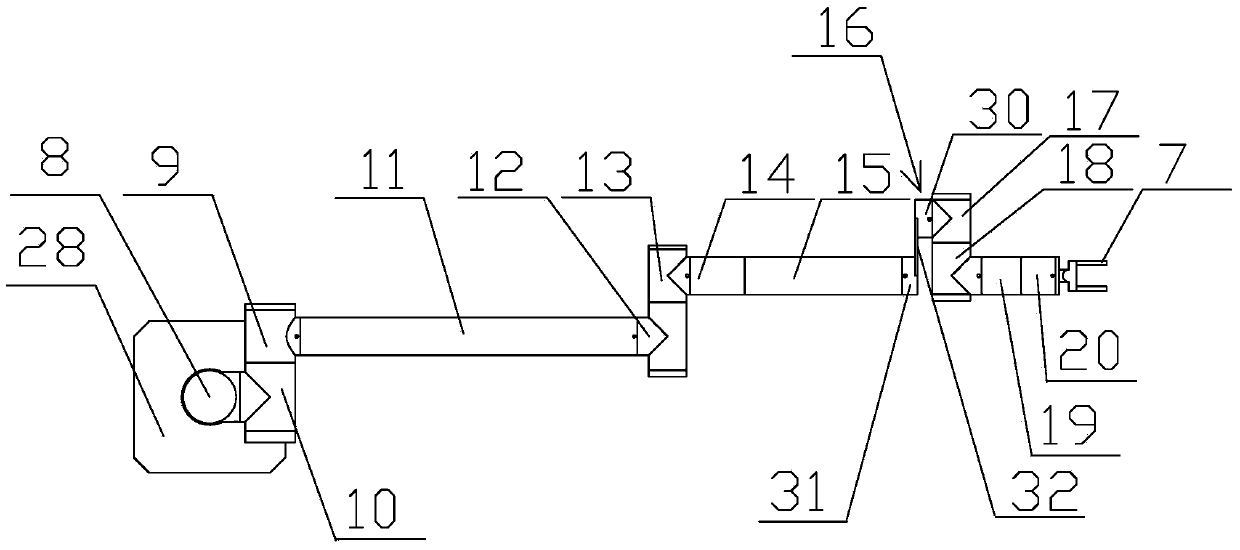
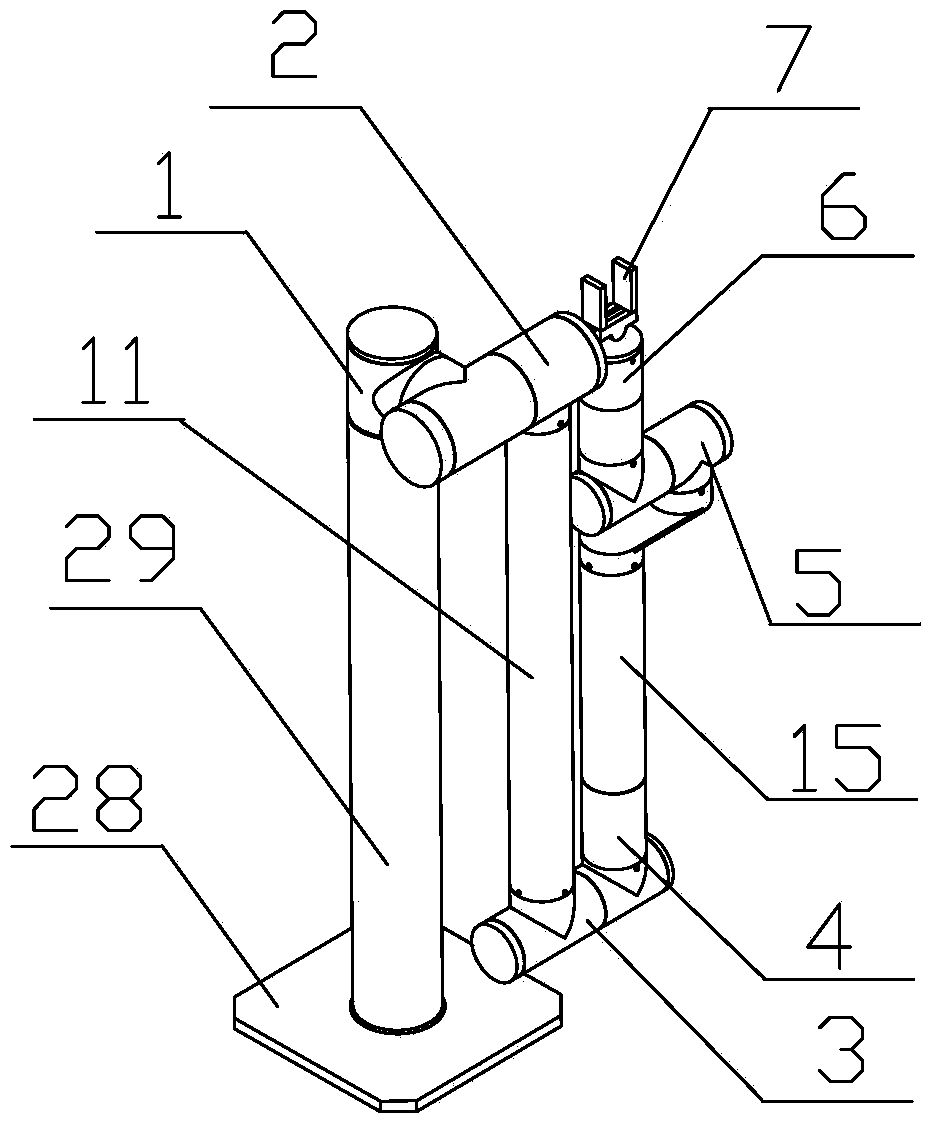
[0025] Such as figure 1 As shown, the foldable six-degree-of-freedom light-duty operating arm with joint axes orthogonal to the present invention includes a base 28 on which a first rotary joint 1, a second rotary joint 2, The arm link 11, the third rotary joint 3, the fourth rotary joint 4, the fifth rotary joint 5 and the sixth rotary joint 6, the output end of the sixth rotary joint 6 is connected to the end single-degree-of-freedom hand claw 7, so The terminal singl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More