Scene depth obtaining method based on integration image technology
A technology of scene depth and acquisition method, applied in the branch of vision measurement technology in the optical field, can solve the problems of element image disturbance, depth inversion in space, etc., to achieve convenient imaging, enhanced accuracy and reliability, and simple and compact structure. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] In order to make the objectives, technical solutions, and advantages of the present invention clearer, the following will be combined with specific embodiments and attached Figure 1-5 , The present invention is further explained in detail.
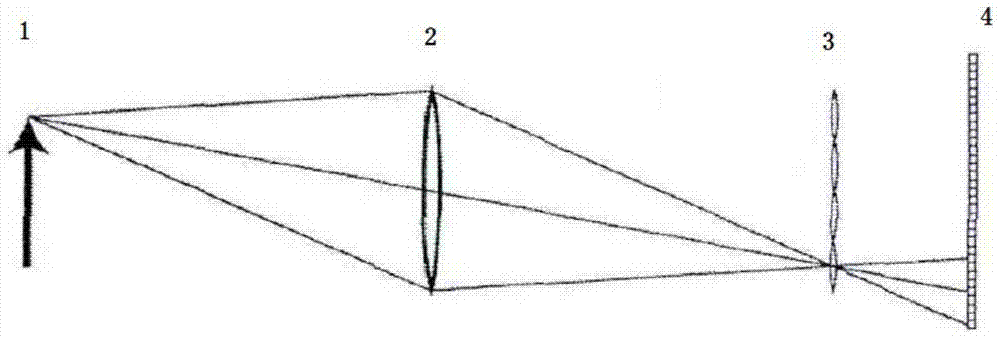
[0037] 1. Insert the micro lens array at the position of the imaging surface of the traditional camera, and the new imaging surface (photosensitive element) moves back to the focal plane of the micro lens array. Cylindrical grating plates can also be used instead of microlens arrays.
[0038] 2. Extract the "view" by sampling from the record to form the integrated image. Points at the same position under different microlenses can be extracted to form a "view". If the size of the entire image is 6000*4000 pixels and there are 10*10 pixels under each micro lens, 100 "views" can be extracted, and the size of each "view" is 600*400. If the columnar grating plate is used in the setting, the "view" only needs to be sampled in the horizonta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More