

Ionic artificial muscle drive based small robot fish and moving method thereof
An artificial muscle and ion-type technology, applied in the application field of smart materials, can solve the problems of inability to realize pectoral fin shaking, forward and backward flapping movements, single driving mode, single pectoral fin driving mode, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
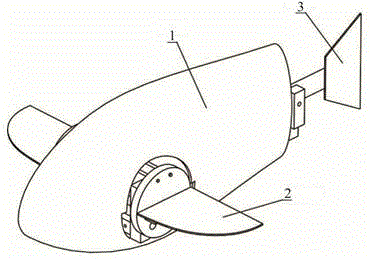
[0032] 1. Robotic fish, pectoral fin drive system, caudal fin drive system design
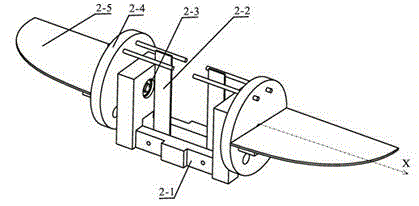
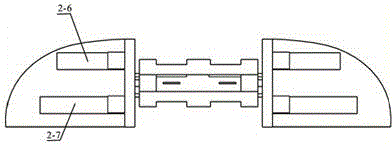
[0033] figure 1 The medium robotic fish is composed of a fish body 1, a pectoral fin drive system 2, and a caudal fin drive system 3. There are signal drive circuits and power sources inside the fish body. figure 2 , image 3 The middle pectoral fin driving system 2 is made up of a U-shaped frame 2-1 located in the fish body 1 and two groups of pectoral fin mechanisms in the left and right sides. Wherein each group of pectoral fin mechanism is all made up of first IPMC material sheet 2-2, rotating shaft and bearing 2-3, rotating disc 2-4, pectoral fin film 2-5, the second IPMC material sheet 2-6, the 3rd IPMC material The U-shaped frame 2-1 is composed of two side plates and a bottom plate on the left and right; the rotating disc 2-4 is installed on the U-shaped frame through the rotating shaft and bearing 2-3. The outside of frame 2-1 side plate; Rotating disc 2-4 inboard has a pair of dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More