

Flexibility motion control IP (Intellectual Property) core and implementation method thereof
A motion control and flexible technology, applied in the direction of motor control, control system, electrical components, etc., can solve the problems of high cost, shortened control cycle, slow operation speed, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
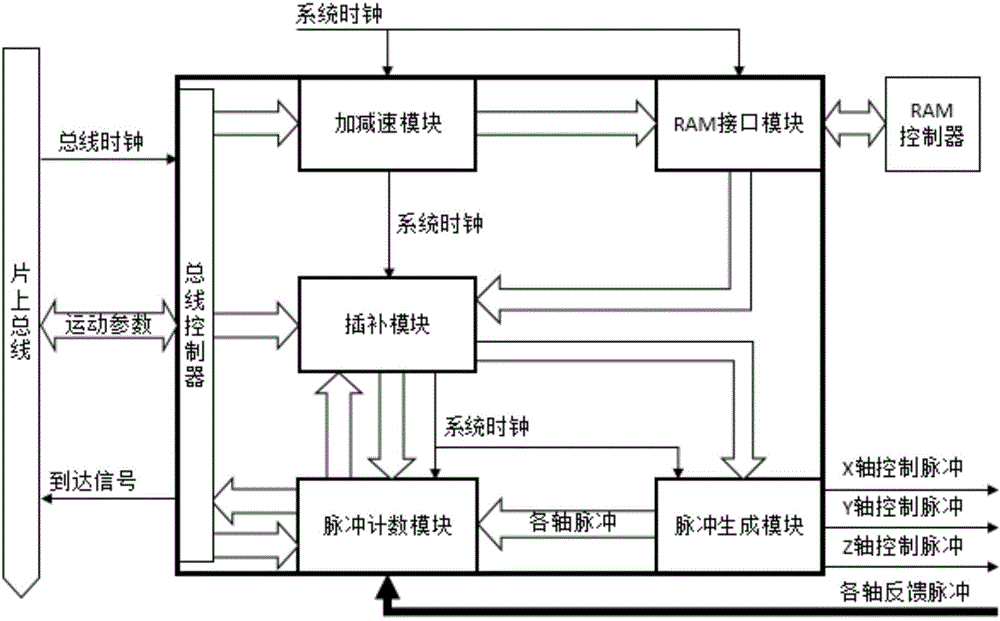
[0054] Such as figure 1 As shown, a flexible motion control IP core of the present embodiment includes an acceleration and deceleration module, an interpolation module, a pulse counting module, a pulse generation module, a bus controller and a RAM interface module, and the bus controller is respectively connected to; The deceleration module, the interpolation module and the pulse counting module are connected, and the acceleration and deceleration module is connected with the interpolation module and the RAM interface module; the interpolation module is connected with the RAM interface module and the pulse counting module; the pulse counting module is also connected with the Pulse generation module connection;
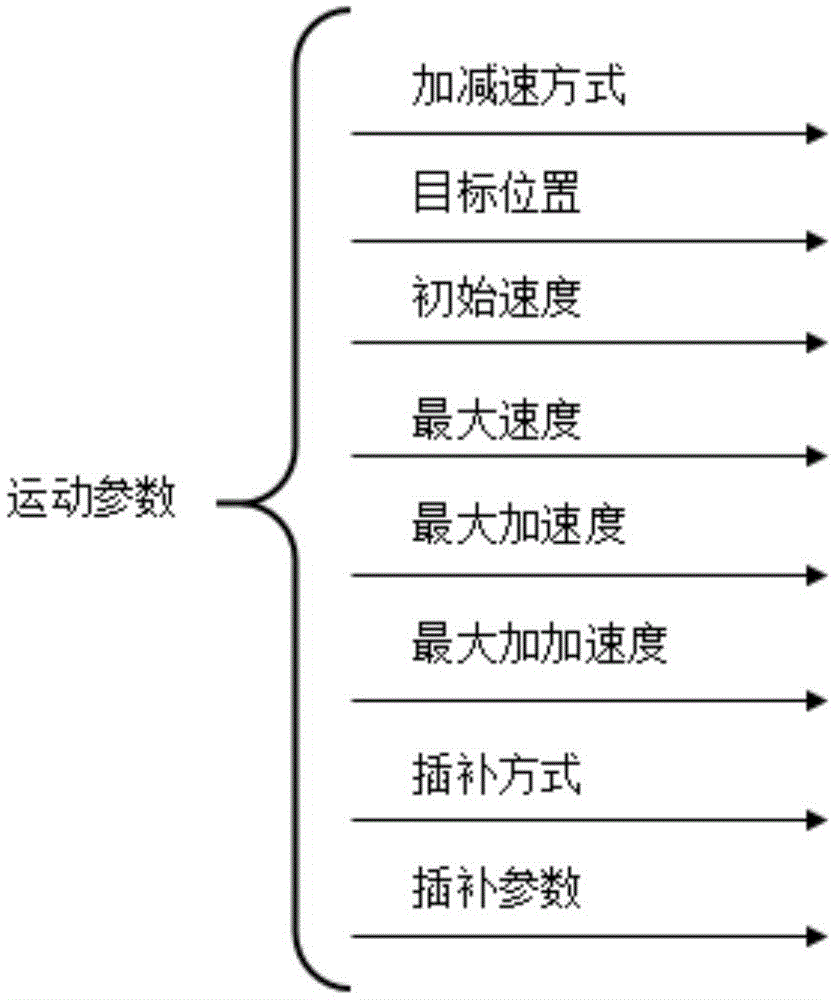
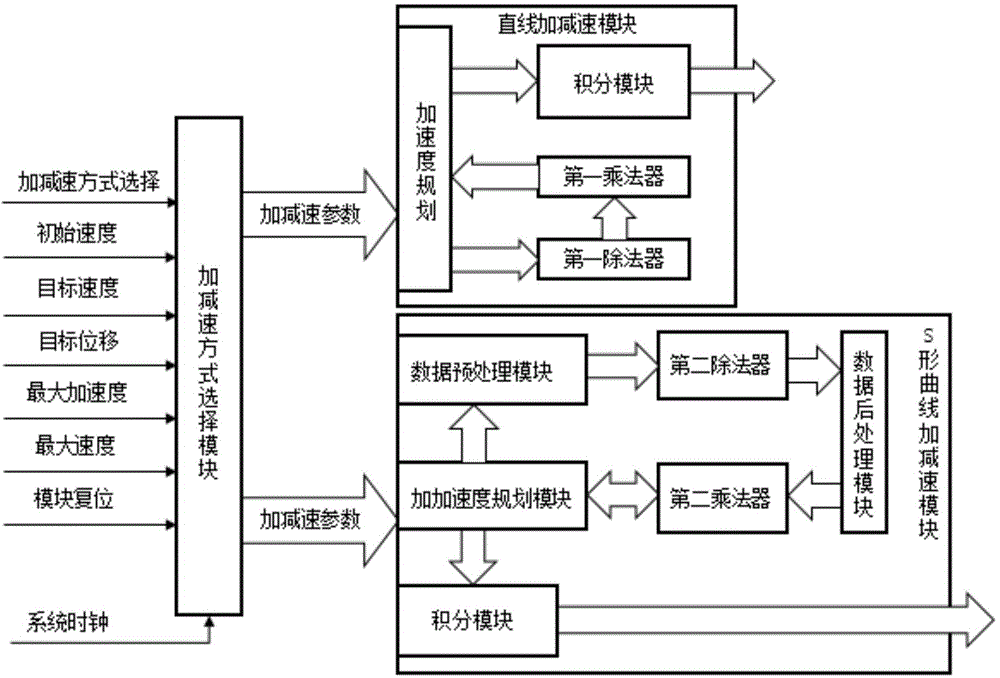
[0055] The acceleration and deceleration module is used to select initial speed, target speed, maximum speed, maximum acceleration and target position parameters according to the acceleration and deceleration mode sent by the CPU, calculate a suitable acceleration and de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More