

Direction estimation method of MIMO-UKF-MUSIC (Multiple Input Multiple Output-Unscented Kalman Filter-Multiple Signal Classification) target
A MIMO-UKF-MUSIC, target-oriented technology, applied in computing, radio wave reflection/re-radiation, special data processing applications, etc., to achieve the effects of interference suppression, accuracy improvement, and estimation accuracy improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
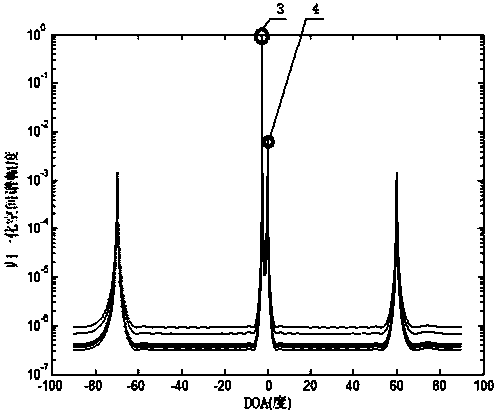
[0025] The MIMO-UKF-MUSIC target direction estimation method of this embodiment, such as image 3 and Figure 4 As shown, the target direction estimation method is realized through the following steps:
[0026] Step 1: Obtain multiple sets of DOA estimated values and multiple sets of DOD estimated values in the multi-sensor array under the MIMO system,
[0027] Step 2: Then filter the DOA estimated value and the DOD estimated value respectively to obtain multiple sets of DOA estimated filter values and multiple sets of DOD estimated filtered values, and calculate the mean value of multiple sets of DOA estimated filter values and multiple sets of DOD estimated filtered values to obtain the final DOA estimates and final DOD estimates;
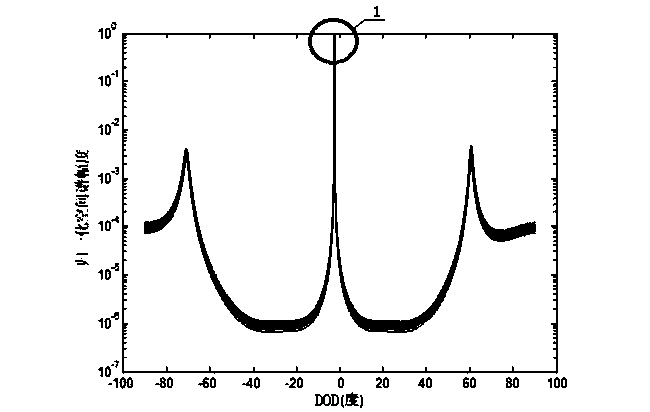
[0028] Such as figure 1 , the calculation process of each group of DOA estimated filter values in step 1 is:
[0029] Step 11: use the front-back spatial smoothing MUSIC algorithm to estimate the DOA of the transmitted signal rece...
Embodiment 1
[0036] In the MIMO-UKF-MUSIC target direction estimation method described in Embodiment 1, the forward and backward spatial smoothing MUSIC algorithm described in step 14 in step 11 is specifically:
[0037] First, calculate the covariance matrix: in,
[0038] The forward smoothing covariance is: p represents the number of divided sub-arrays and p=M-m+1, M is the number of array elements, m is the number of array elements of each sub-array, wherein, S i Indicates the subarray data covariance, A H Denotes the conjugate transpose of the array-steering vector matrix A, I denotes the identity matrix, P f represents the forward smoothing covariance matrix and P f = 1 p Σ i = 1 p D i - 1 P ( ...
specific Embodiment approach 3
[0046] According to the MIMO-UKF-MUSIC target direction estimation method described in Embodiment 2, the number p of sub-arrays is: p=D+1; wherein, D is the number of signal sources.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More