

Turbine blade laser cutting system based on machine vision and industrial robot
An industrial robot and laser cutting technology, applied to laser welding equipment, manipulators, manufacturing tools, etc., can solve the problems of large damage to optical devices, high environmental requirements, and affecting work efficiency, etc., to achieve low cost, ensure operating efficiency, reduce The effect of data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will now be described in further detail in conjunction with the accompanying drawings and preferred embodiments. These drawings are all simplified schematic diagrams, and only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
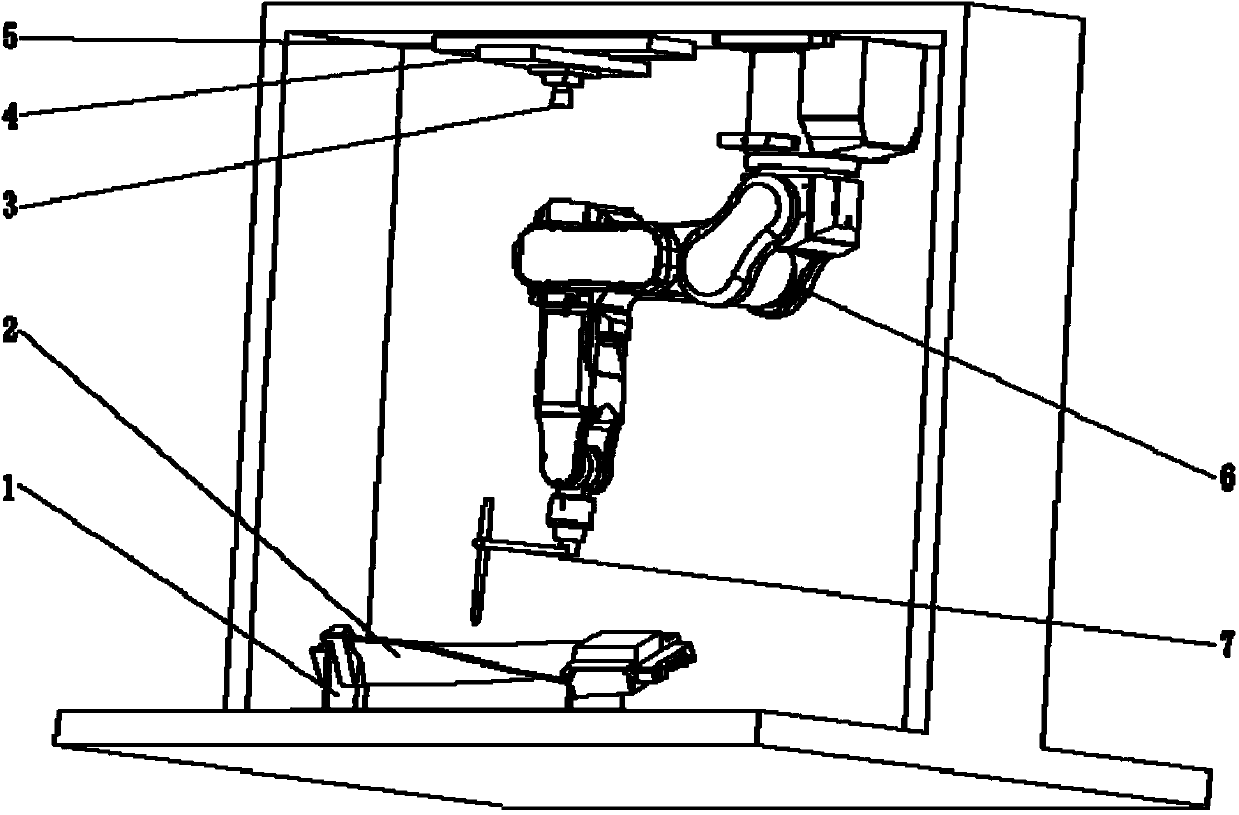
[0019] like figure 1 As shown, a laser cutting system for turbine blades based on machine vision and industrial robots includes an industrial computer, a gantry mechanical platform, an industrial robot with a laser cutter at the end, an image acquisition module, and a multi-axis motion control module; the gantry mechanical A blade fixture is arranged on the platform, and a turbine blade blank is clamped on the blade fixture.
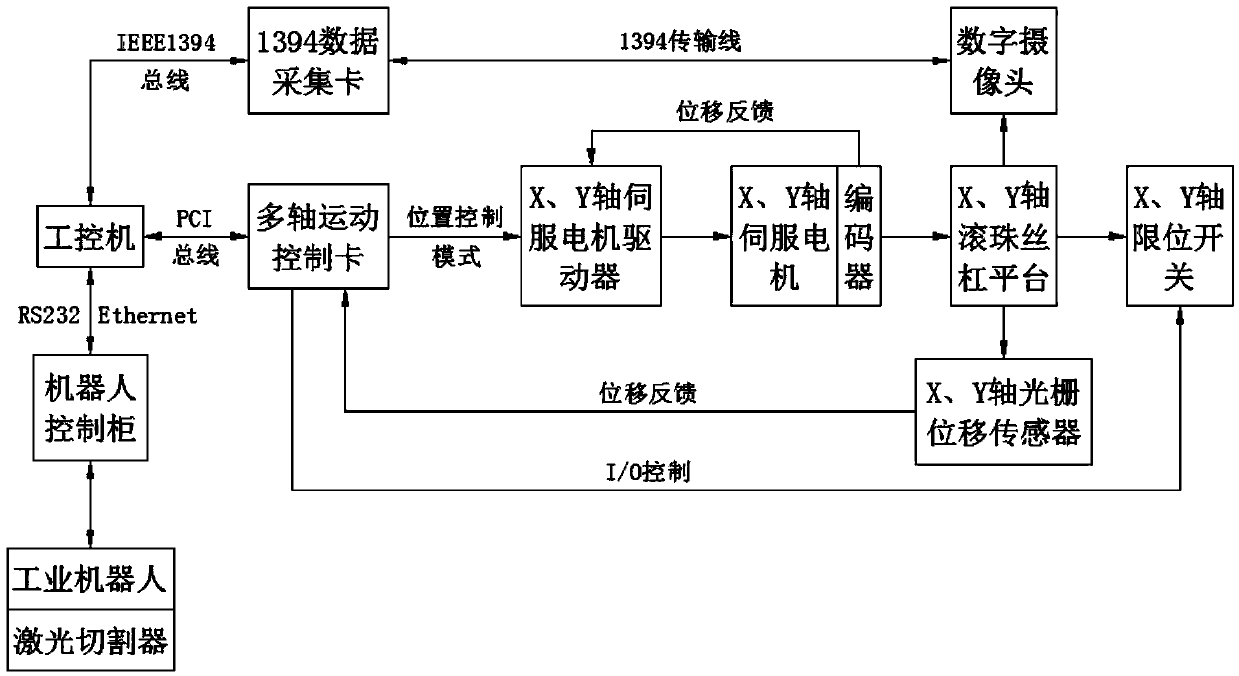
[0020] figure 2 Shown is the block diagram of the working principle of the present invention: among the figure, the industrial computer controls the multi-axis motion control card through the PCI bus ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More