

High/low-frequency composite driving six-degree-of-freedom parallel movement platform
A motion table, high and low frequency technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of no vibration isolation function, limited attitude adjustment ability, and limited mechanism load capacity, so as to increase the flexibility of use and improve Mechanism adaptability, effect of increasing carrying capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
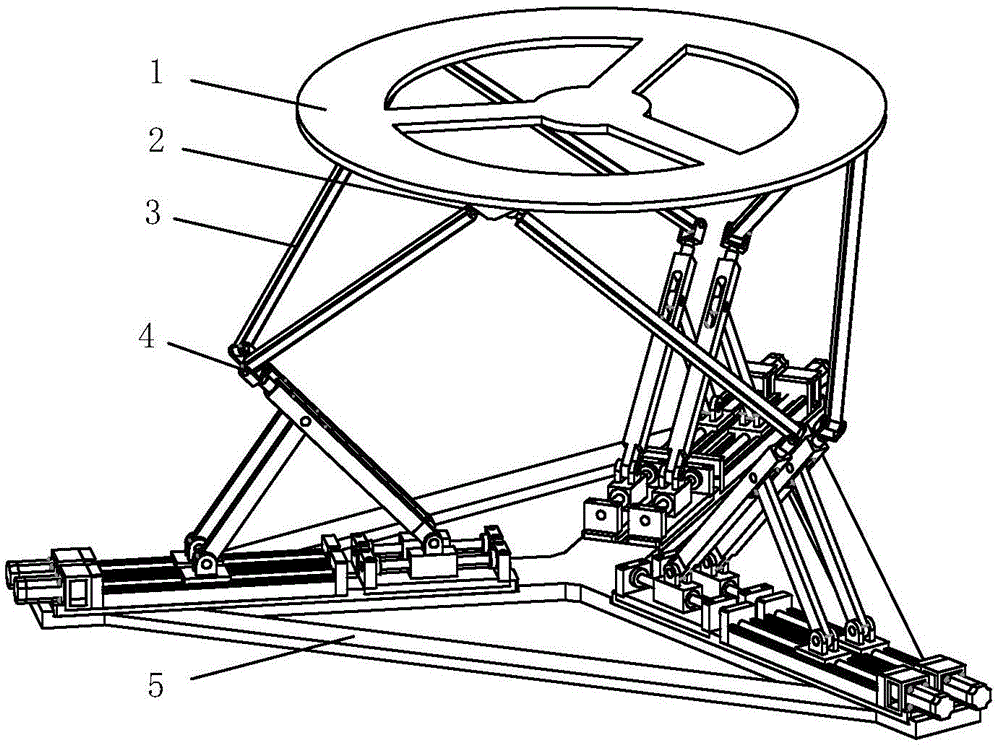
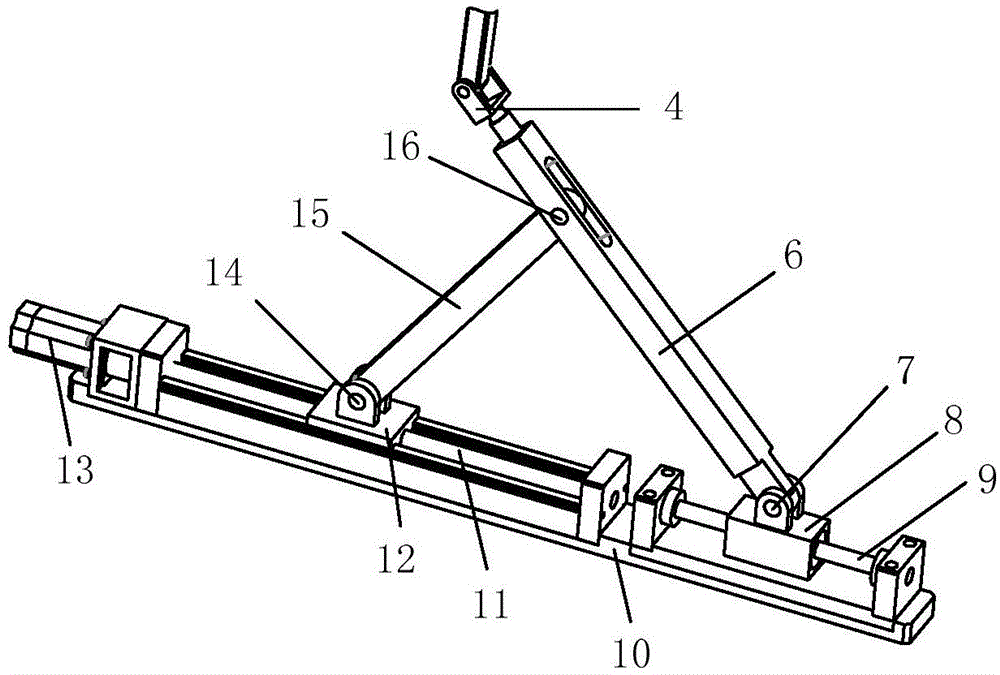
[0027] exist figure 1 and figure 2In the schematic diagram of the high-low frequency compound drive six-degree-of-freedom parallel kinematic table shown, the six high-low frequency compound drive branches with the same structure include the compound drive unit and the transmission strut 3. One end of the branch is fixedly connected to the base mounting frame 5, and the other end is connected to the target The motion platform 1 is connected, and the six high-low frequency composite drive branches are divided into three groups with two as a group. The plane where the two-branch composite drive units in the same group are located is along the vertical direction and parallel to each other. The three groups of branches are installed on the on the base mount. The driving branch is connected to the target moving platform at six hinge points, and the hinge points connected to the target moving platform by two adjacent driving branches in different groups are divided into three group...
Embodiment 2
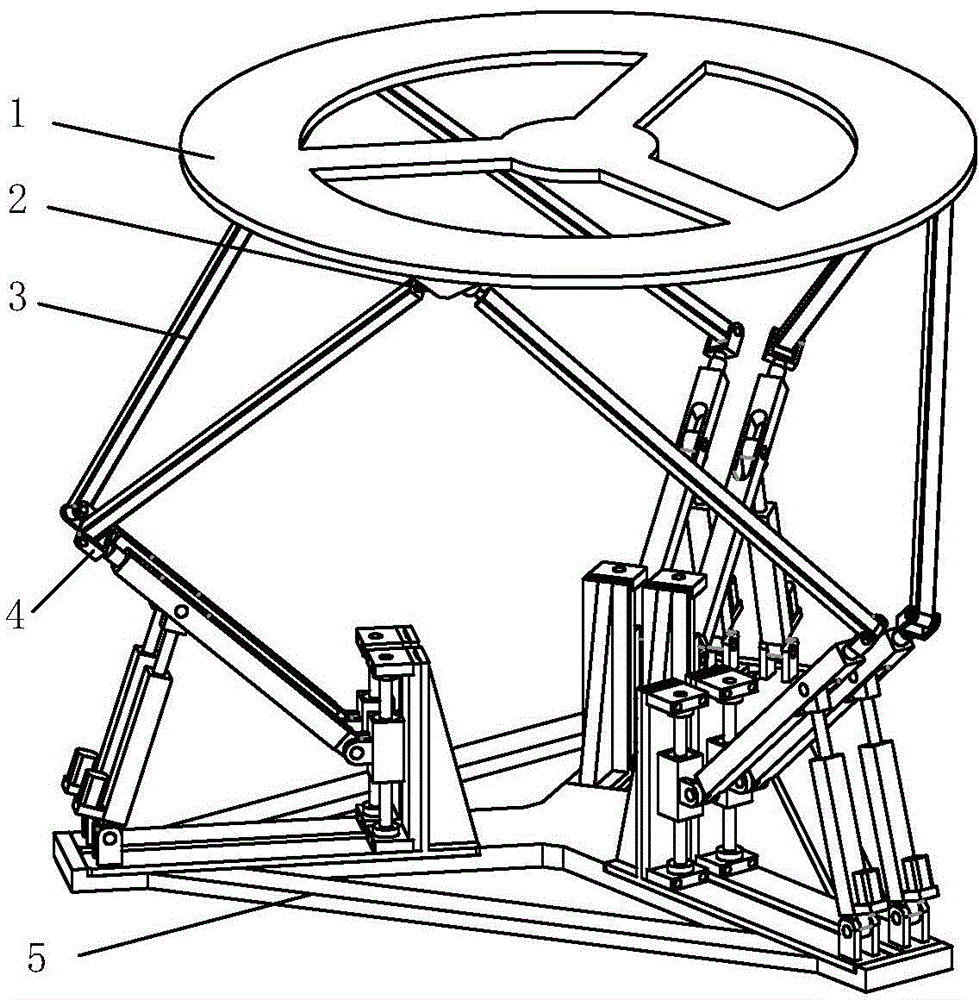
[0029] exist image 3 and Figure 4 In the schematic diagram of the high-low frequency compound drive six-degree-of-freedom parallel kinematic table shown, the six high-low frequency compound drive branches with the same structure include the compound drive unit and the transmission strut 3. One end of the branch is fixedly connected to the base mounting frame 5, and the other end is connected to the target The motion platform 1 is connected, and the six high-low frequency composite drive branches are divided into three groups with two as a group. The plane where the two-branch composite drive units in the same group are located is along the vertical direction and parallel to each other. The three groups of branches are installed on the on the base mount. The driving branch is connected to the target moving platform at six hinge points, and the hinge points connected to the target moving platform by two adjacent driving branches in different groups are divided into three grou...
Embodiment 3
[0031] exist Figure 5 and Figure 6 In the schematic diagram of the high-low frequency compound drive six-degree-of-freedom parallel kinematic table shown, the six high-low frequency compound drive branches with the same structure include the compound drive unit and the transmission strut 3. One end of the branch is fixedly connected to the base mounting frame 5, and the other end is connected to the target The motion platform 1 is connected, and the six high-low frequency composite drive branches are divided into three groups with two as a group. The plane where the two-branch composite drive units in the same group are located is along the vertical direction and parallel to each other. The three groups of branches are installed on the on the base mount. The driving branch is connected to the target moving platform at six hinge points, and the hinge points connected to the target moving platform by two adjacent driving branches in different groups are divided into three gro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More