

Method for detecting vehicle motion information based on integration of binocular stereoscopic vision and optical flow
A technology of binocular stereo vision and motion information, applied in image analysis, instruments, calculations, etc., can solve the problem of low accuracy and achieve the effect of simple device, improved accuracy, and large amount of information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
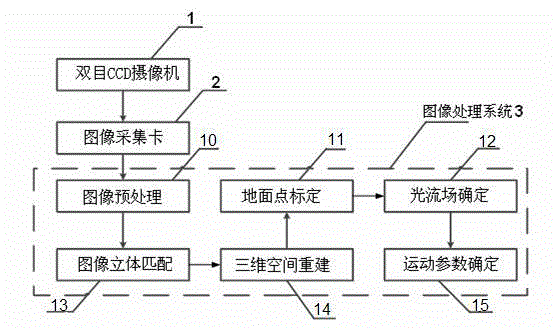
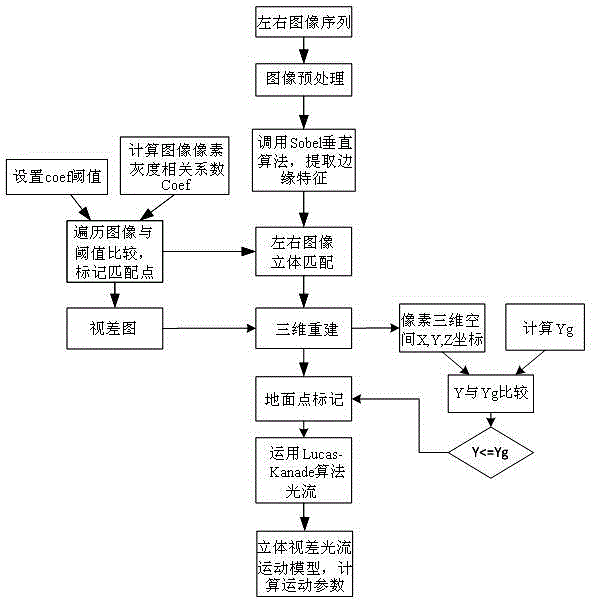
[0033] A detection method of vehicle motion information based on binocular stereo vision and optical flow fusion. Analyze and process the image sequence captured by the binocular stereo camera, and through the steps of feature matching, 3D reconstruction, feature extraction, and optical flow calculation, obtain the 3D motion velocity and 3D rotation angular velocity of the vehicle, and realize the motion information estimation of the vehicle body.
[0034] Such as figure 1 The structural diagram of the vehicle motion information detection based on binocular stereo vision and optical flow fusion in the illustrated embodiment, the system includes an image capturing unit, an acquisition and storage unit, and an analysis and processing unit. In this embodiment, the binocular CCD camera 1 is used as the moving image shooting unit, the image acquisition card 2 is used as the acquisition and storage unit, and the image processing system 3 is used as the analysis and processing unit....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More