

Creeping type welding robot system
A welding robot and sensing system technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve problems such as poor stability, large resistance, poor turning radius and center accuracy, and achieve good stability , Easy to operate, good maneuverability effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
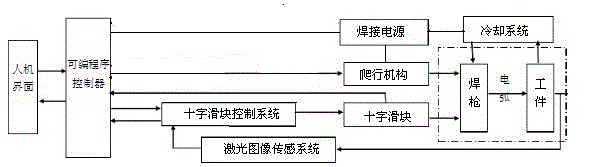
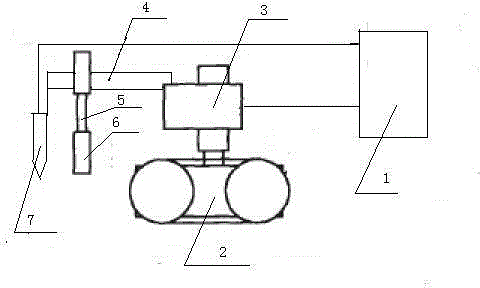
[0026] Such as figure 1 As shown, a crawling welding robot system, the system includes: a welding power supply that provides electric energy to the welding robot system; a laser image sensing system that obtains image information of the weld from the scene; a cross slider control system that controls the laser The image information obtained by the image sensing system is processed, and the deviation signal of the weld is extracted after processing; the cross slider, the cross slider receives the deviation signal provided by the cross slider control system to move; the permanent magnet crawler mechanism, the permanent magnet The driving mechanism of the crawler mechanism adopts an AC servo system, and the AC servo system includes a reduction mechanism, an amplifier and a motor; a programmable controller. After setting various parameters on the man-machine interface, the programmable controller receives the signal obtained by the laser image sensor system to obtain the image inf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More