

Force sensor for sensing surgical operating force
A technology of operating force and sensor, applied in the field of force sensing system and surgical equipment, can solve the problem that the force sensing system cannot meet the requirements of high precision, high efficiency and high intelligence, cannot detect friction force and torsion force, and the application of sensing device Limitation of scope and other issues, to achieve great versatility and applicability, high practical value, and the effect of improving stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
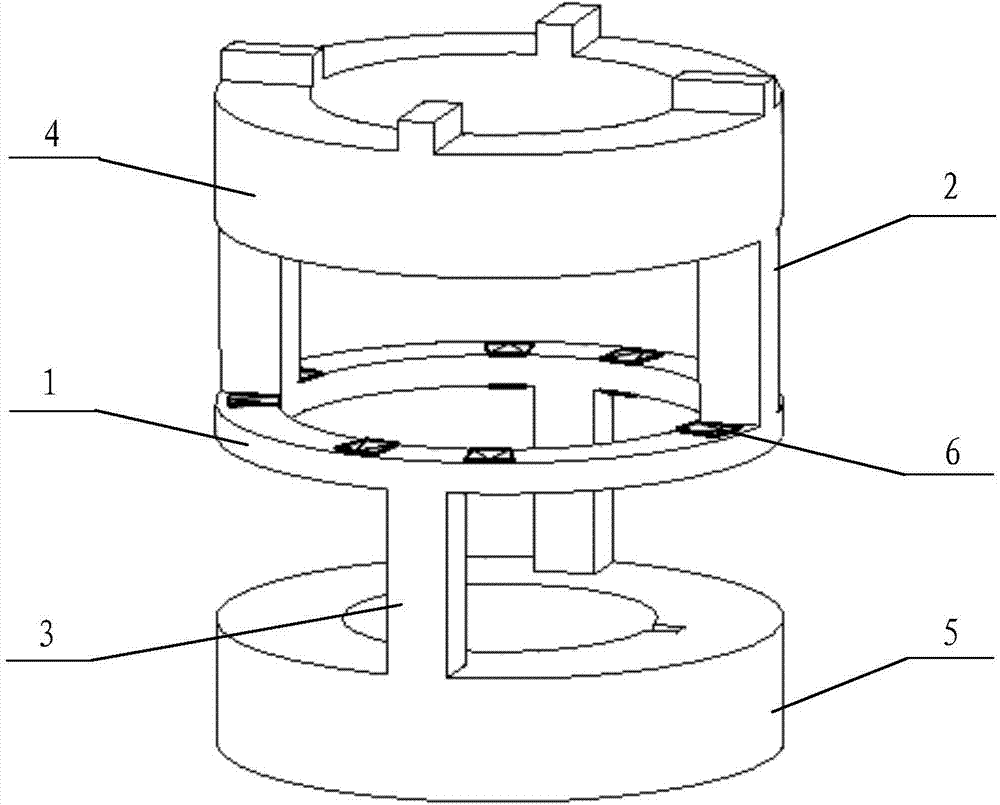
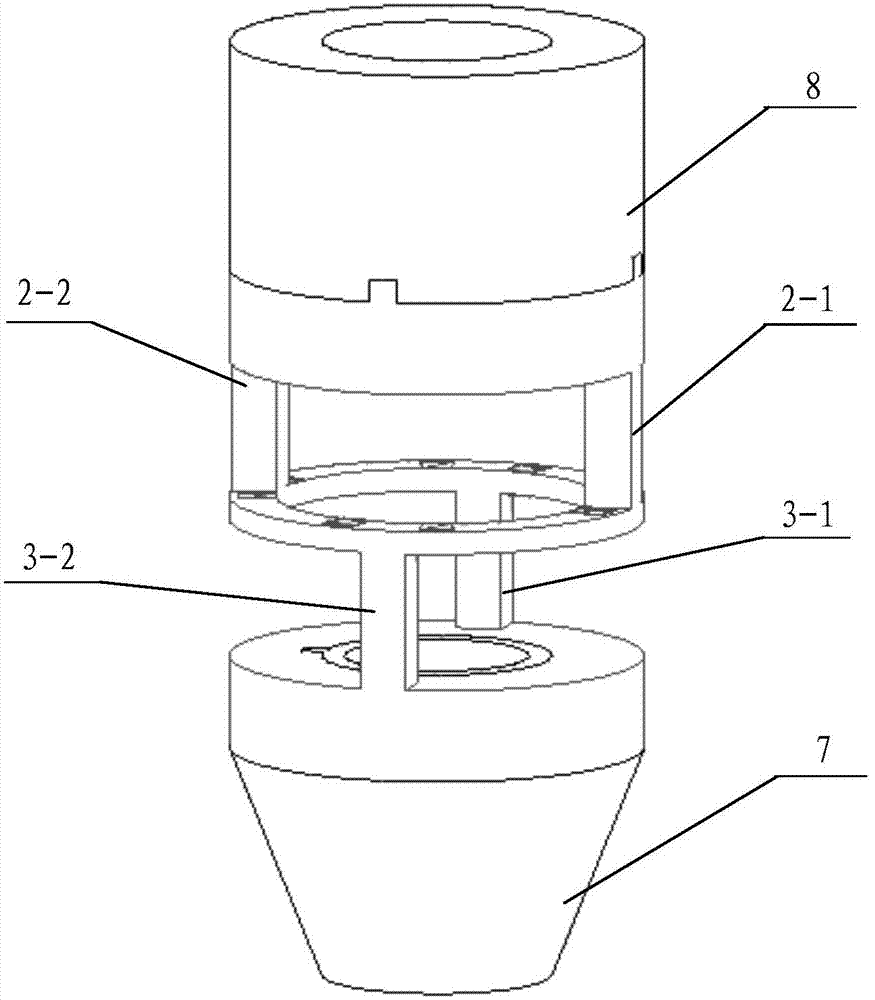
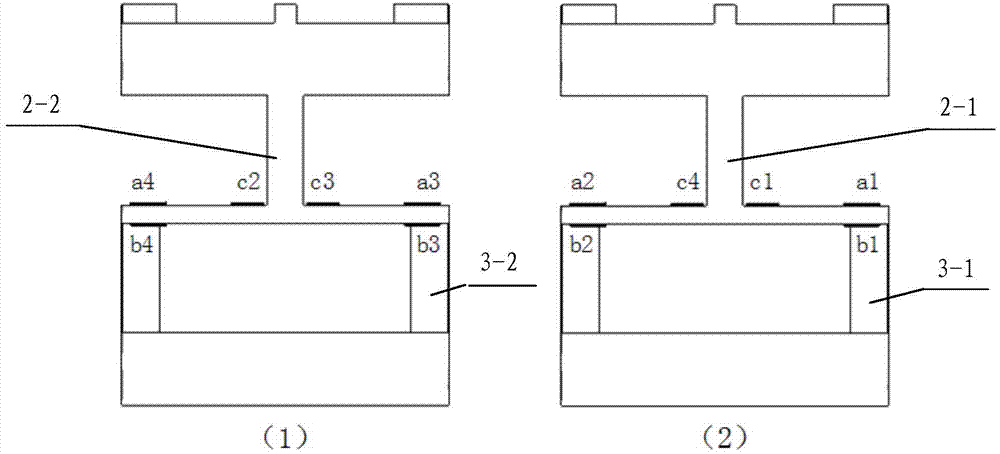
[0038] Refer to attached figure 1, a force-sensitive sensor used for force perception in surgical operations. The structure of its sensing sensitive element includes a flexible beam 1, an upper vertical beam 2, a lower vertical beam 3, an upper base 4 and a lower base 5. In order to ensure the sensitive The rigidity of the components reduces the mass at the same time, and the sensitive components are preferably made of aluminum alloy, of course, the use of high-strength plastics (such as nylon materials) can also meet the requirements. Two pairs of upper vertical beams 2 and lower vertical beams 3 are perpendicular to the flexible beam 1, the width of each vertical beam is 1 mm, the outer diameter of the arc at both ends is 9 mm, the inner diameter is 7 mm, and the height is 3 mm. The upper vertical beam 2 and the lower vertical beam The beam 3 plays ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More