

Two-wheeled self-balancing robot control method based on Kinect device
A self-balancing, robotic technology, applied in the field of human-computer interaction systems, to achieve the effect of convenient manipulation, remarkable effect and strong system robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] Below in conjunction with accompanying drawing and specific embodiment the present invention will be further described:
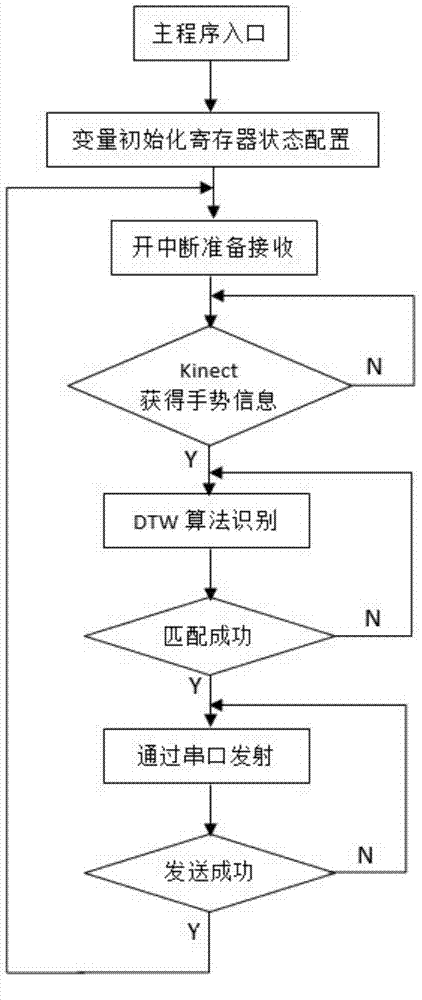
[0045] A two-wheeled self-balancing robot control method based on the Kinect device, such as figure 1 As shown, the method includes the following steps:
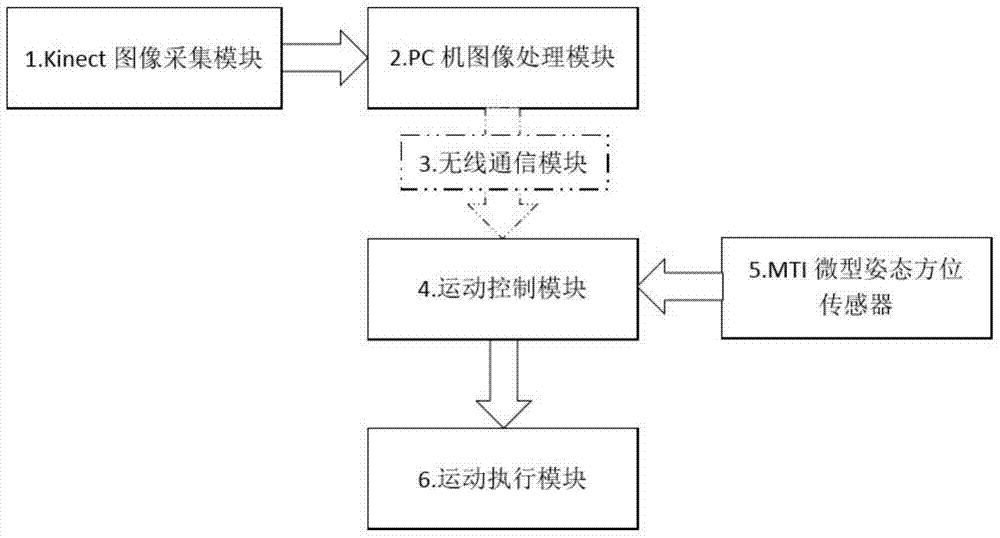
[0046] Step 1: Connect the USB interface cable of Kinect to the USB interface of PC and configure the software operating environment;
[0047] Step 2: Open the VS2010 compilation environment and run the successfully compiled image processing main program;
[0048] Step 3: Power on the two-wheel self-balancing robot, and download the robot control program to the digital signal processor of the control system through the debugging software and USB data cable;
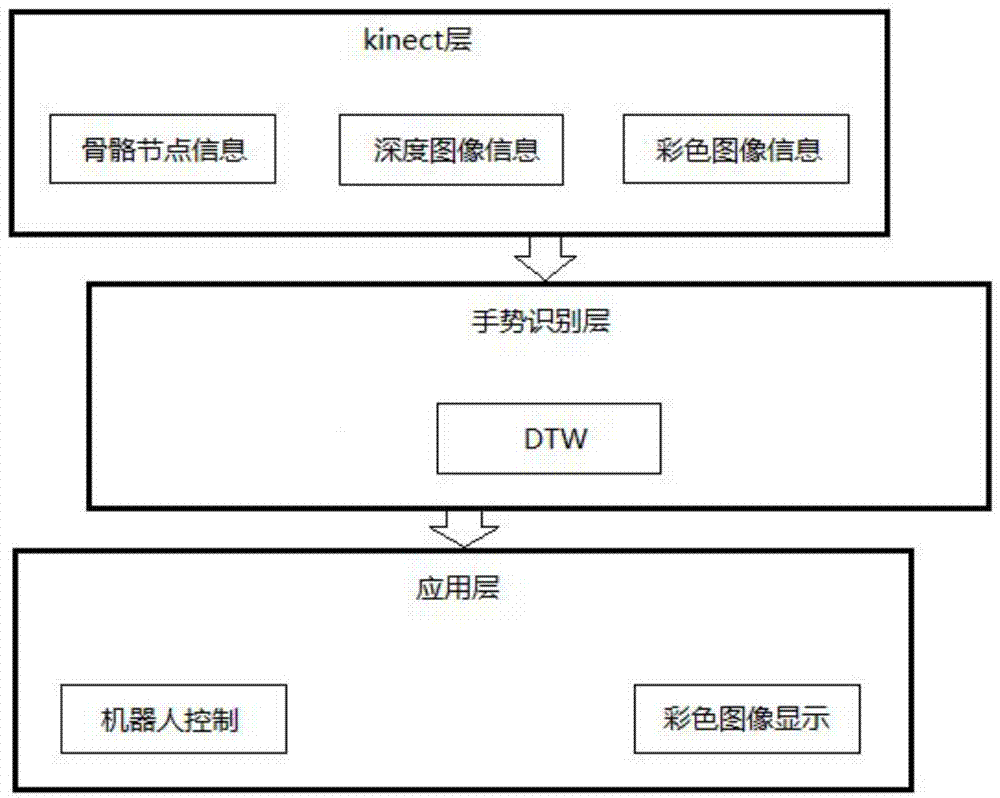
[0049] Step 4: collect gesture information through Kinect and perform preprocessing;
[0050] Step 5: The computer uses the DTW algorithm to classify the preprocessed gesture information, and compares it with the gesture samples in the temp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More