

Magnetic-adsorption multifunctional flaw detection robot
A multi-functional, magnetic adsorption technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of inapplicability, low efficiency, complex structure, etc., to improve adsorption performance and running performance, improve use efficiency and work efficiency, and broad Use foreground effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
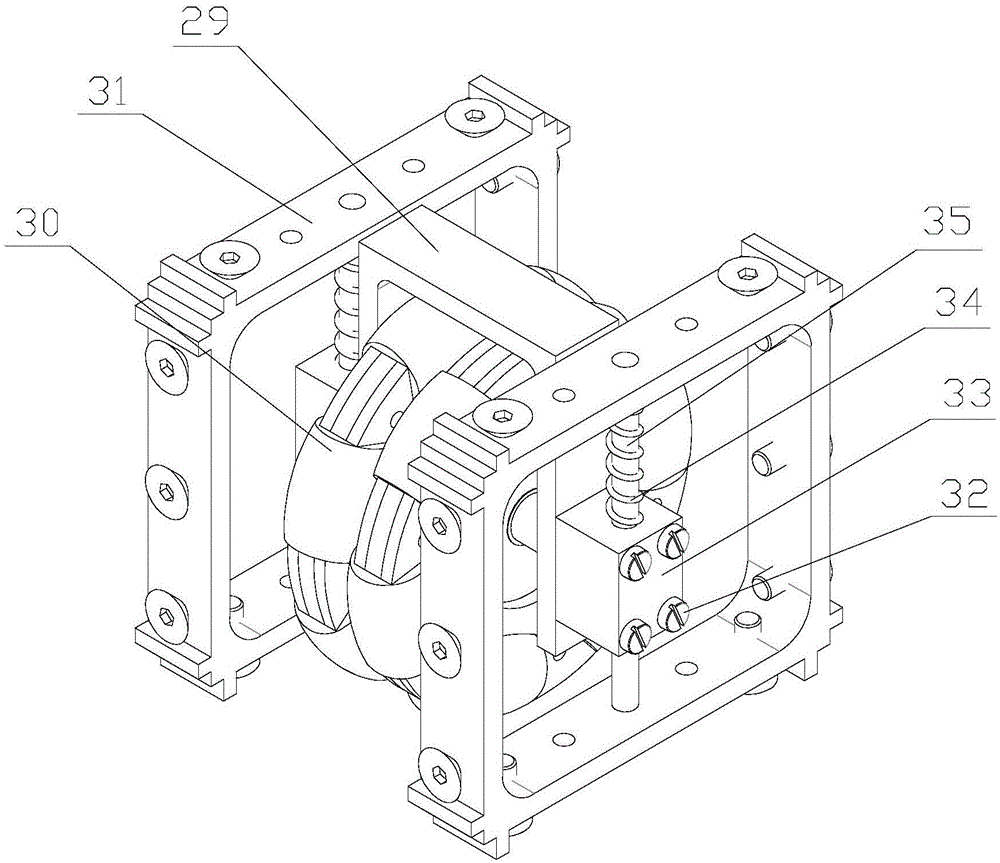
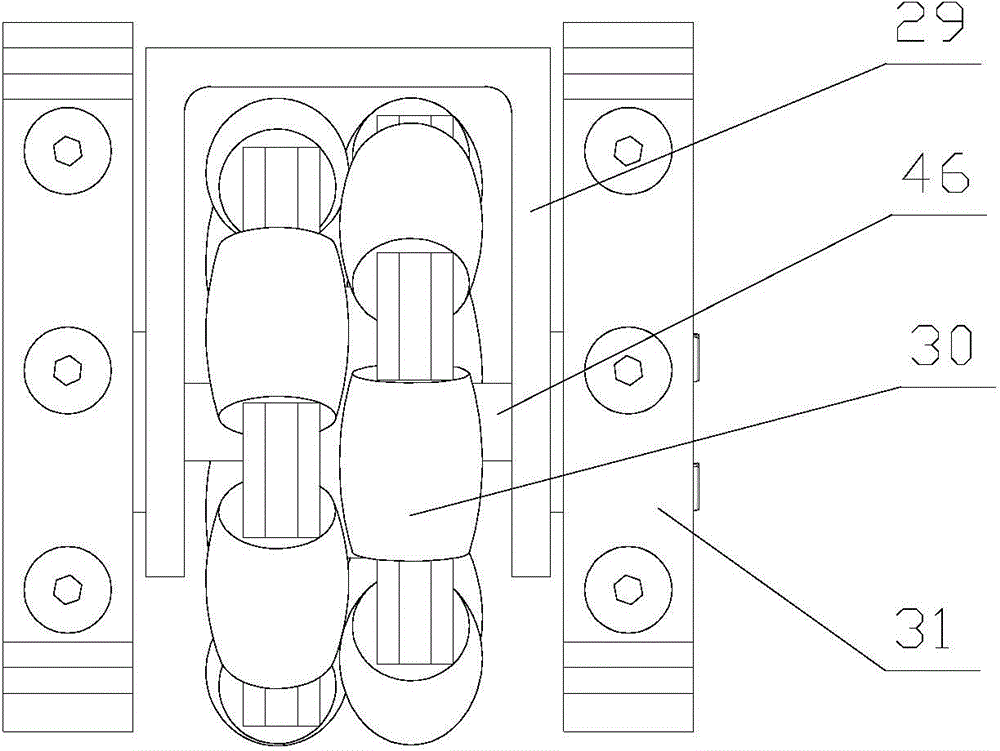
[0028] Such as Figure 1 to Figure 5 As shown, a magnetic adsorption multifunctional flaw detection robot includes a housing 50 and a remote control handle arranged outside the housing 50. The housing 50 is made of carbon fiber sheet; a floating mechanism and a transmission mechanism are arranged in the housing 50. , a controller, a motor 3 and at least two magnetic wheels 38, the present embodiment adopts two magnetic wheels 38; the floating mechanism, the transmission mechanism, the controller and the motor 3 are fixed in the housing 50, and the power output end of the motor 3 The transmission mechanism is fixedly connected with the axle 41 of the magnetic wheel 38, and the control end of the motor 3 is connected with the controller; a wireless transmitter is arranged in the remote control handle, and a wireless receiver is arranged...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More