

Multi-robot cooperative control method based on input-restricted self-excited driving
An input-limited, multi-robot technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems affecting system performance, system instability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
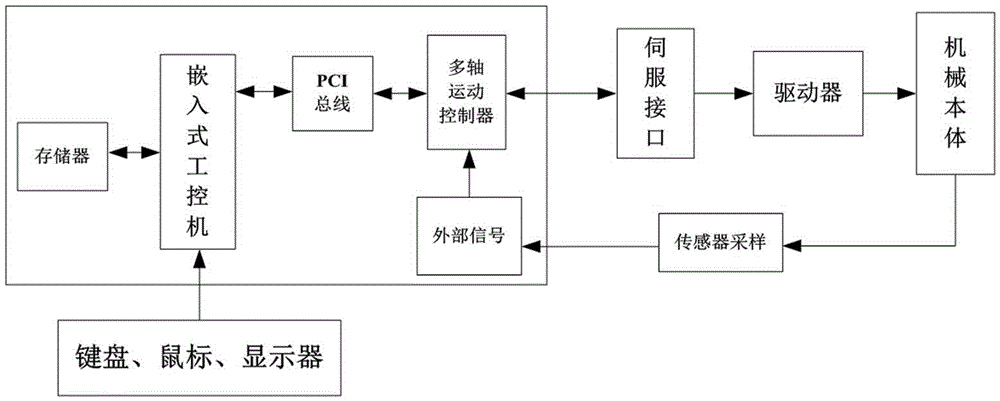
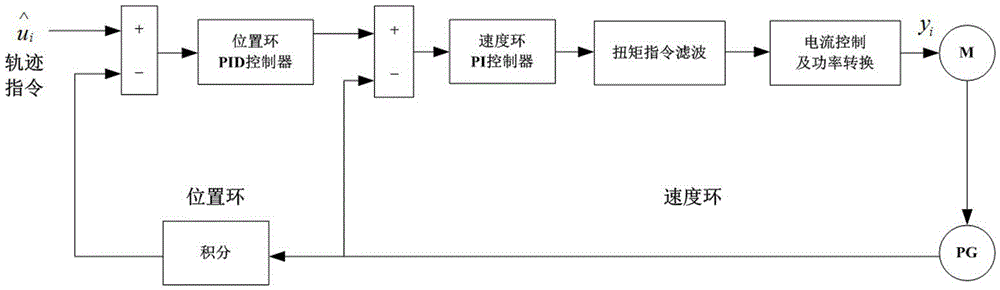
[0047] A typical PC-based SCARA robot control system such as figure 1 As shown, the entire control system is divided into three layers, the bottom layer is the robot body, the robot body is driven by an AC servo motor and a precision planetary reducer, and the signal from the servo motor encoder is transmitted to the servo control level. The servo control stage is composed of AC servo motor driver and multi-axis motion control card. The servo control stage adopts three closed-loop control structures of high-precision position, speed and current to complete the control of multiple joints. After the PC as the upper computer completes the overall trajectory planning, it sends instructions to the multi-axis motion controller, and then the multi-axis motion controller completes the closed-loop control algorithm, and sends the control amount to the servo driver according to a certain communication protocol, and finally drives mechanism to perform the desired movement.
[0048] The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More