

Kilowatt-level rock output three-redundancy electro-hydraulic digital servo system
A digital servo and three-redundancy technology, which is applied in fluid pressure actuation system components, fluid pressure actuation devices, mechanical equipment, etc. Mechanism reliability can not be guaranteed and other problems, to achieve the effect of compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
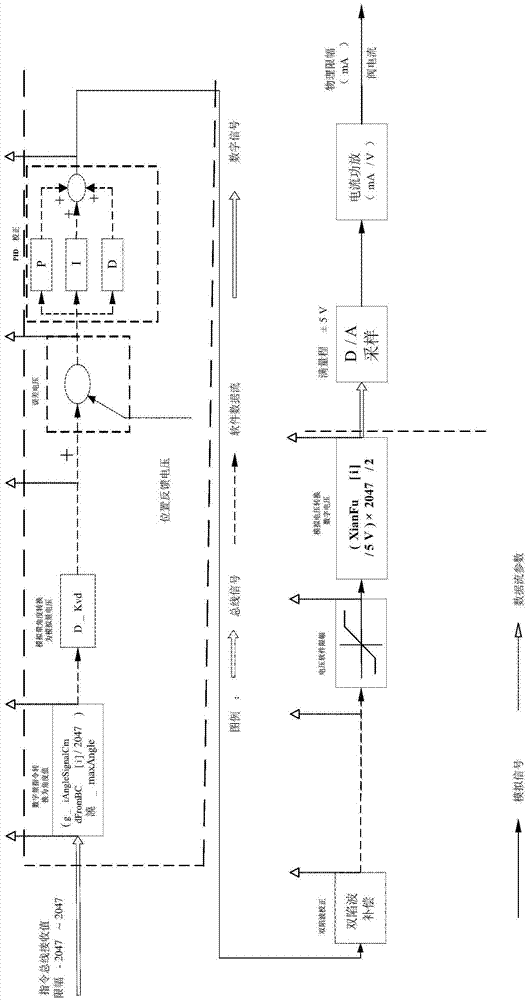
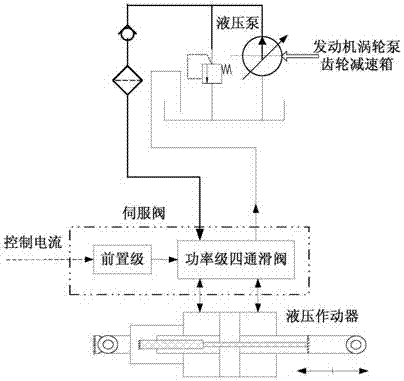
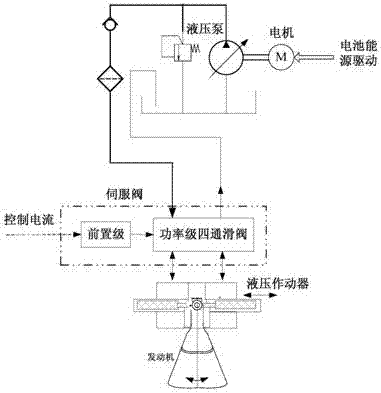
[0038] The basic idea of the invention is: a three-redundant electro-hydraulic digital servo system based on kilowatt-level swing output. In essence, the three-degree redundancy is to adopt redundant design for the fault-prone links such as the pre-stage of the electro-hydraulic servo valve, the feedback potentiometer of the actuator, the key control link, and the closed-loop control of the position of the servo controller, so as to realize the "failure of the servo mechanism control Fault tolerance”; digitalization essentially means that the electro-hydraulic servo valve cancels the traditional dynamic pressure feedback device and replaces it with algorithm compensation for the digital servo controller to achieve high dynamic response requirements and has the advantage of flexible parameter adjustment. In addition, the kilowatt-level swing output triple-redundant electro-hydraulic digital servo system adopts a high-speed, high-specific-power DC motor and a fast-response dire...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More