

Unmanned aerial vehicle route planning system and unmanned aerial vehicle route planning method based on genetic programming
A technology of genetic programming and track planning, which is applied in the direction of genetic rules, genetic models, data processing applications, etc., to achieve the effects of rapid optimization process, optimized fitness, and reduced computing time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
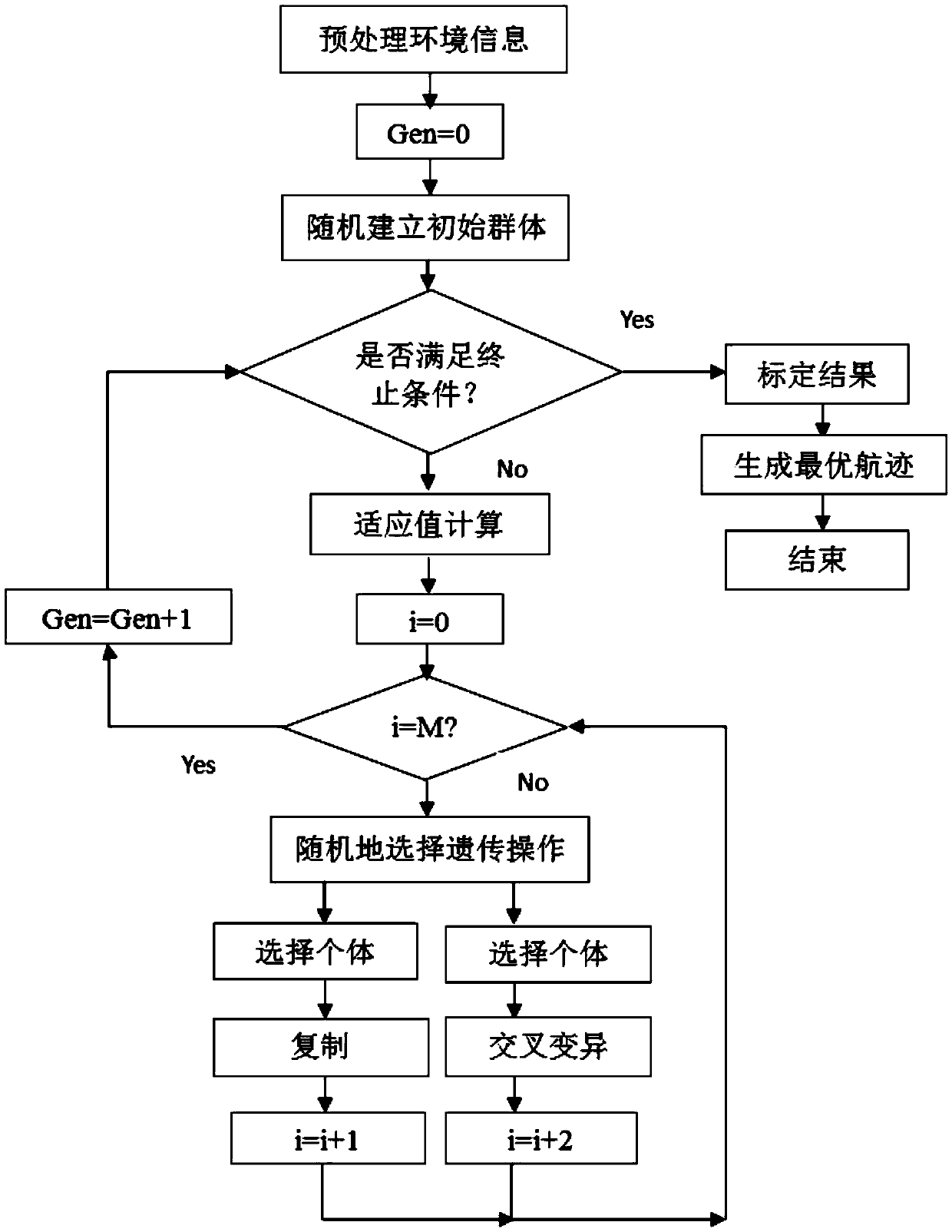
[0040] Such as figure 1 As shown, this embodiment includes the following steps:
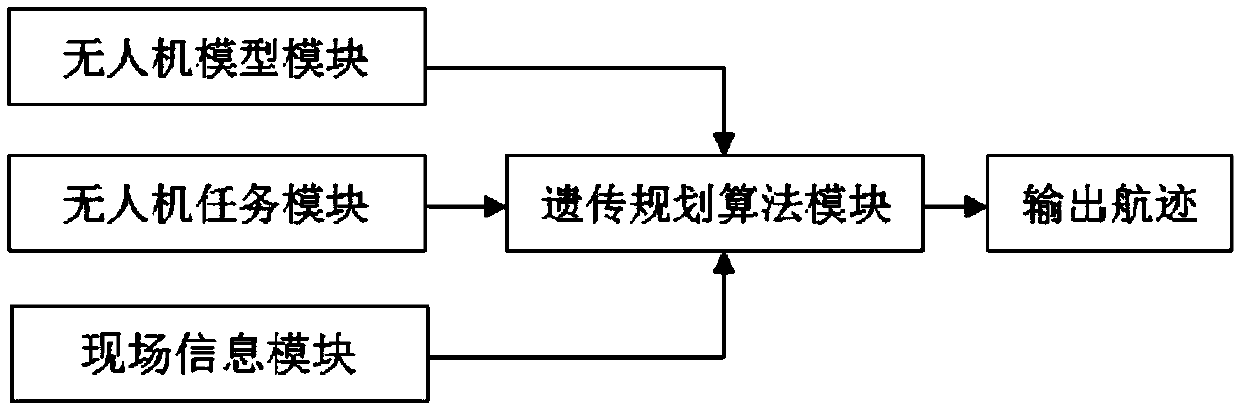
[0041] Step A, the UAV task module constructs an optimization equation;
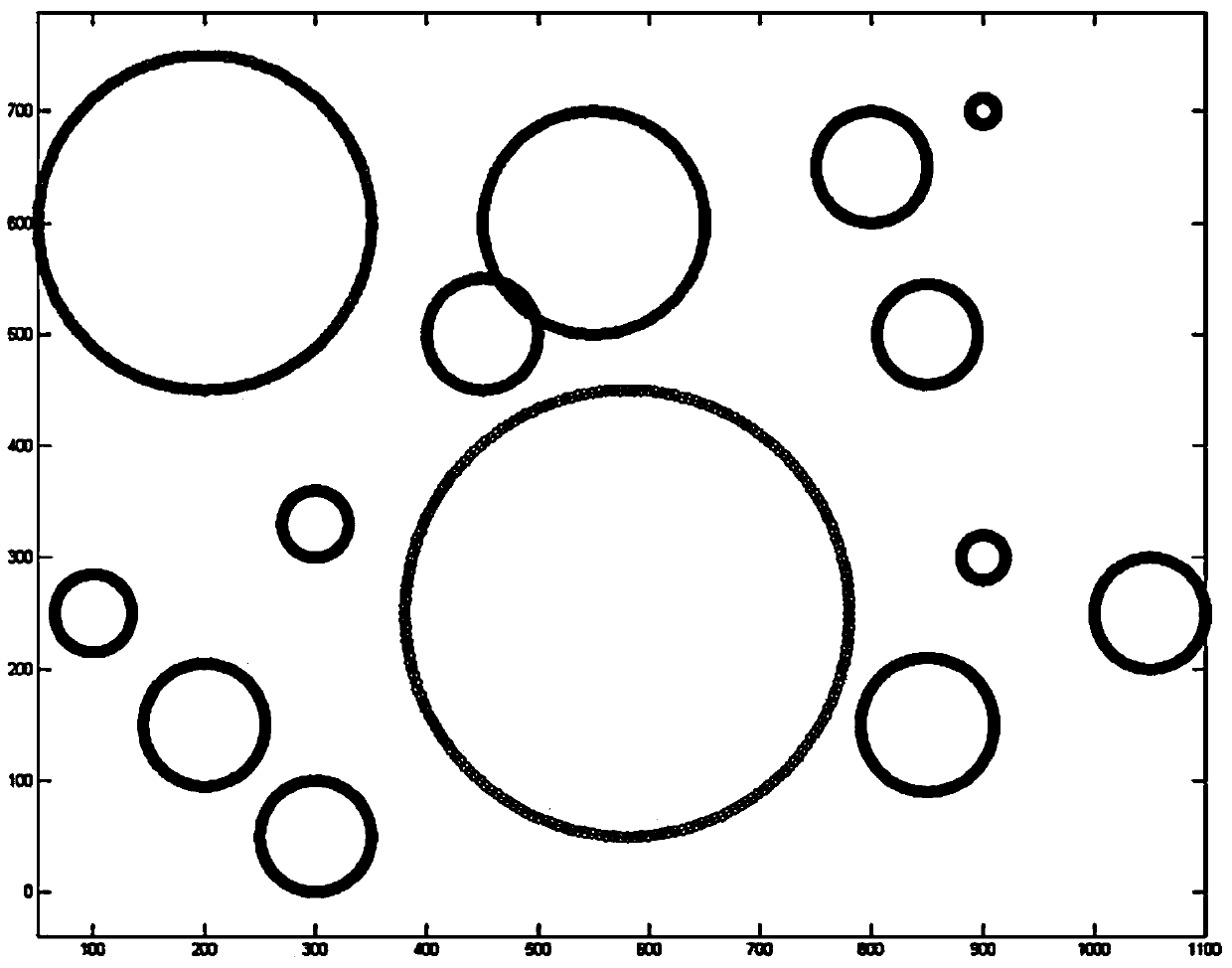
[0042] Step B, the scene information module defines the terrain and threats, such as image 3 shown;
[0043] Step C, the genetic programming algorithm module preprocesses the initial information: use the original threat and map information, use the map information to make a two-dimensional planar map, add the threat location and threat radius marked in step B to the map; and use the UAV The model module calculates the parameters in the fitness value function according to the cost functions such as path length and flight height.
[0044] Step D, initialize the population: define the population size as 100, and set the number of each depth as n=100 / (maximum-1), where: maximum is the set maximum depth. Define the GPLIB_Entity class, that is, the individual class, and the generated individuals are stored in the collection ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More