

Composite-wing vertical take-off and landing unmanned aerial vehicle
A technology of vertical take-off and landing and unmanned aerial vehicles, which is applied in the direction of vertical take-off and landing aircraft, rotorcraft, motor vehicles, etc., to reduce the difficulty of control, improve the control accuracy, and improve the effect of yaw control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
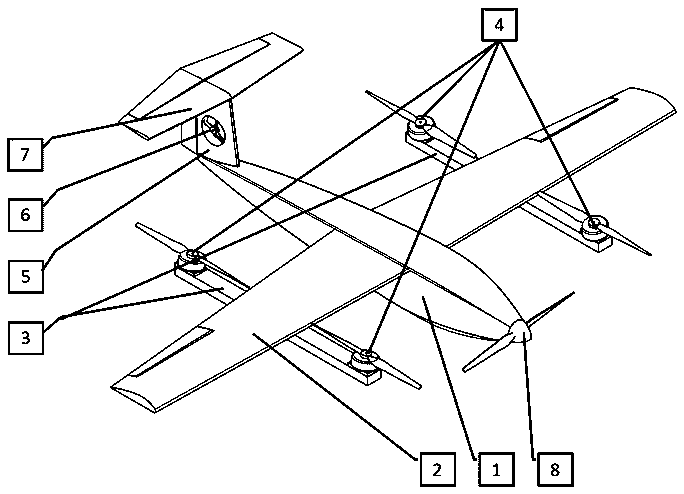
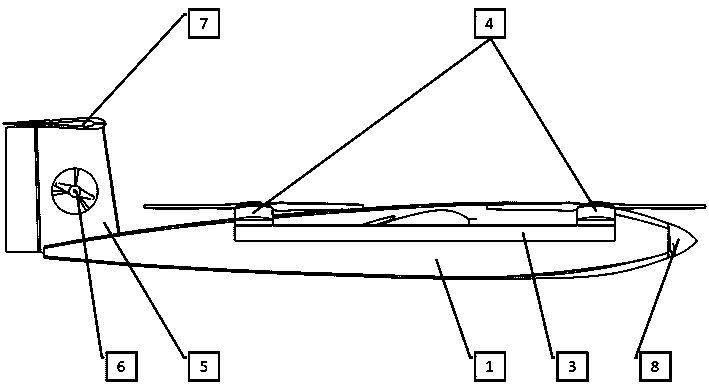
[0037] like figure 1 and figure 2 As shown, a compound wing vertical take-off and landing UAV includes a fuselage 1, a wing 2 fixed on the fuselage 1 and symmetrical to the length direction of the fuselage 1, and a vertical power unit fixed on the wing 2 4 and the level flight power unit 8 fixed on the fuselage 1, also includes a vertical empennage 5 fixed on the fuselage 1, the vertical empennage 5 is also provided with a yaw control unit 6 and a horizontal empennage 7;
[0038] The wing 2 is fixed on the middle section of the fuselage 1, and two ailerons are hinged on the trailing edge of the wing 2, and the two ailerons are located on different sides of the fuselage 1;
[0039] Described vertical power unit 4 is four, and vertical power unit 4 comprises vertical power propeller, motor and electronic governor, and described electronic governor is used for controlling the rotating speed of motor, and described motor is used for braking vertical propeller to rotate;
[0040...
Embodiment 2
[0047] The present embodiment is further limited on the basis of embodiment 1, as figure 1 and figure 2 As shown, as a specific connection scheme of the vertical power unit 4 on the wing 2, it also includes two power unit installation rods 3 for the fixed connection between the vertical power unit 4 and the wing 2, and the two power unit installation rods 3 are respectively It is fixed on different sides of the fuselage 1, and the length direction of the installation rod is parallel to the length direction of the fuselage 1. A vertical power unit 4 is fixed at the end of each power unit installation rod 3 .
[0048] In the above structure, it is convenient to realize that the two vertical power units 4 on the same side of the fuselage 1 are set far apart without changing the size of the wing 2, so as to change the operating state of a single vertical power unit 4 , to obtain a more benchmark UAV flight state control effect.
[0049] Because the UAV provided by the present i...
Embodiment 3
[0058] This embodiment is further limited on the basis of any one of the technical solutions provided in the above embodiments, in order to facilitate changing the size of the yaw moment and roll moment generated by the wing 2 to the UAV under the high-speed flight state of the UAV , the inclination angle of the aileron and the wing 2, and the inclination angle of the aileron and the fuselage 1 are all adjustable.
PUM
| Property | Measurement | Unit |
|---|---|---|
| Span | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More