Distributed high-precision seismic signal acquisition apparatus and acquisition method thereof
A seismic signal and acquisition device technology, applied in seismic data acquisition, seismology, measuring devices, etc., can solve problems such as inability to meet the field production needs of seismic exploration, achieve the goal of reducing field work intensity, simple and practical methods, and simplified complex processes Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Below in conjunction with accompanying drawing and embodiment the present invention is described in further detail:
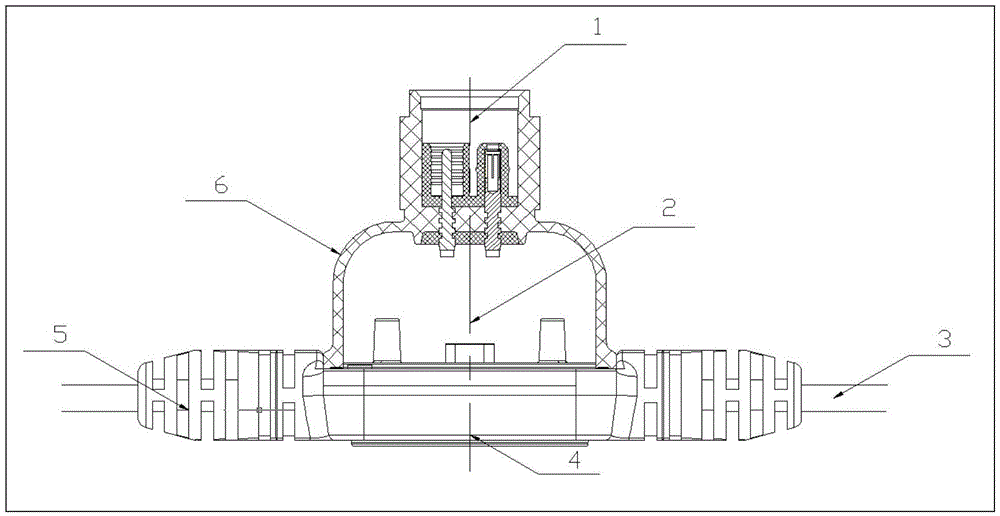
[0025] The distributed high-precision seismic signal acquisition device for hybrid telemetry seismic exploration is composed of the left and right ends of the base 4 respectively connected to the digital transmission cable 3, the digital transmission cable 3 is covered with a cable sheath 5, and the upper part of the base 4 is equipped with a protective shell 6. The space inside the protective case 6 and above the base 4 is the acquisition board compartment 2, the acquisition module is placed in the acquisition board compartment 2, and the upper middle part of the protective case 6 is formed by a detector input plug 1.
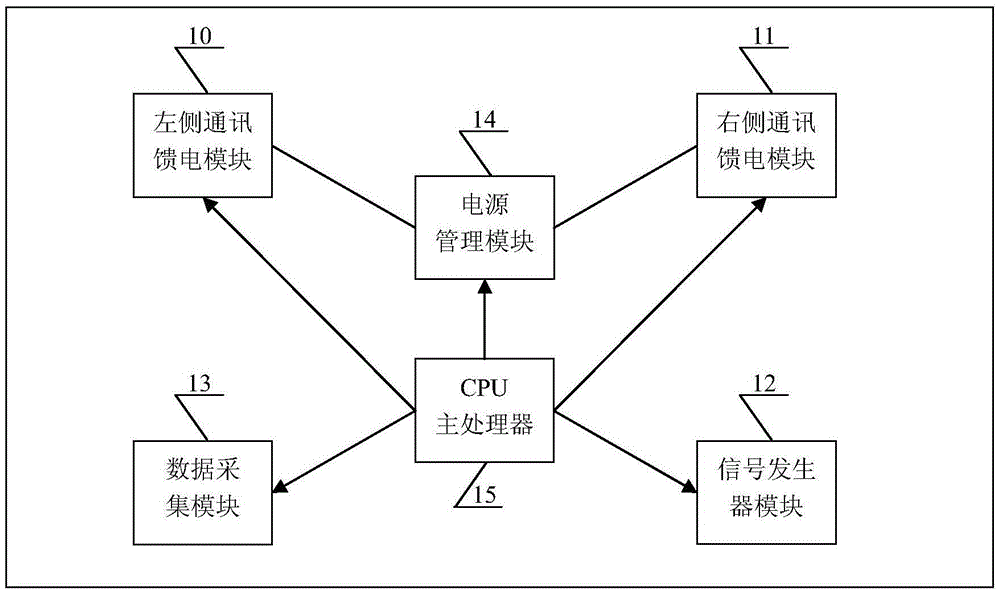
[0026] The acquisition module is connected with the left communication feed module 10, the right communication feed module 11, the signal generator module 12 and the data acquisition module 13 by the main processor 15 respectively, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



