

Four-rotor aircraft sliding mode variable structure control method based on inversion method
A four-rotor aircraft, sliding mode variable structure technology, applied in the field of aircraft control, can solve problems such as poor control effect, instability of quad-rotor aircraft, and increased uncertainty of system parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0127] Below in conjunction with accompanying drawing and example the present invention will be further described.
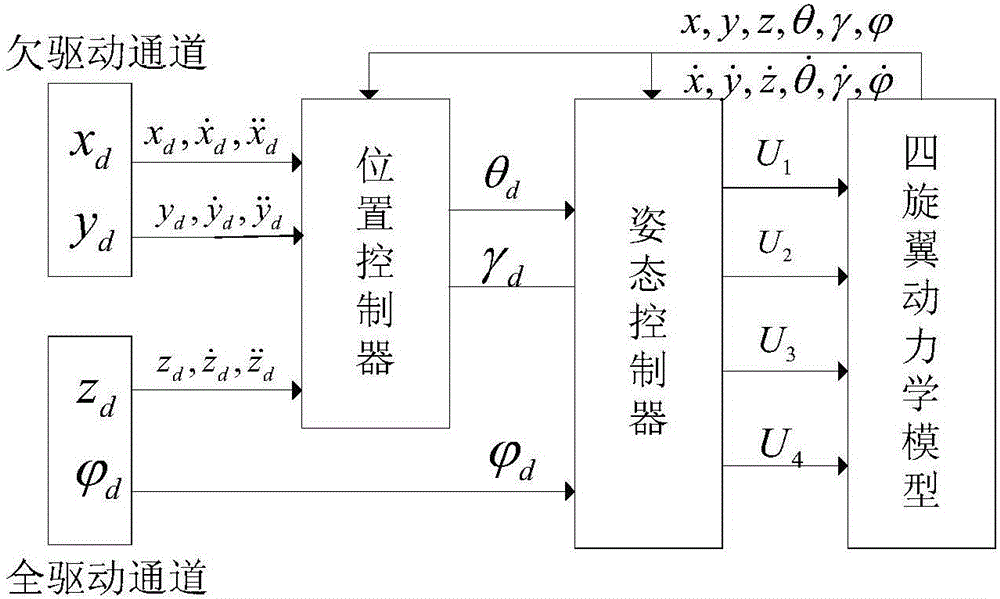
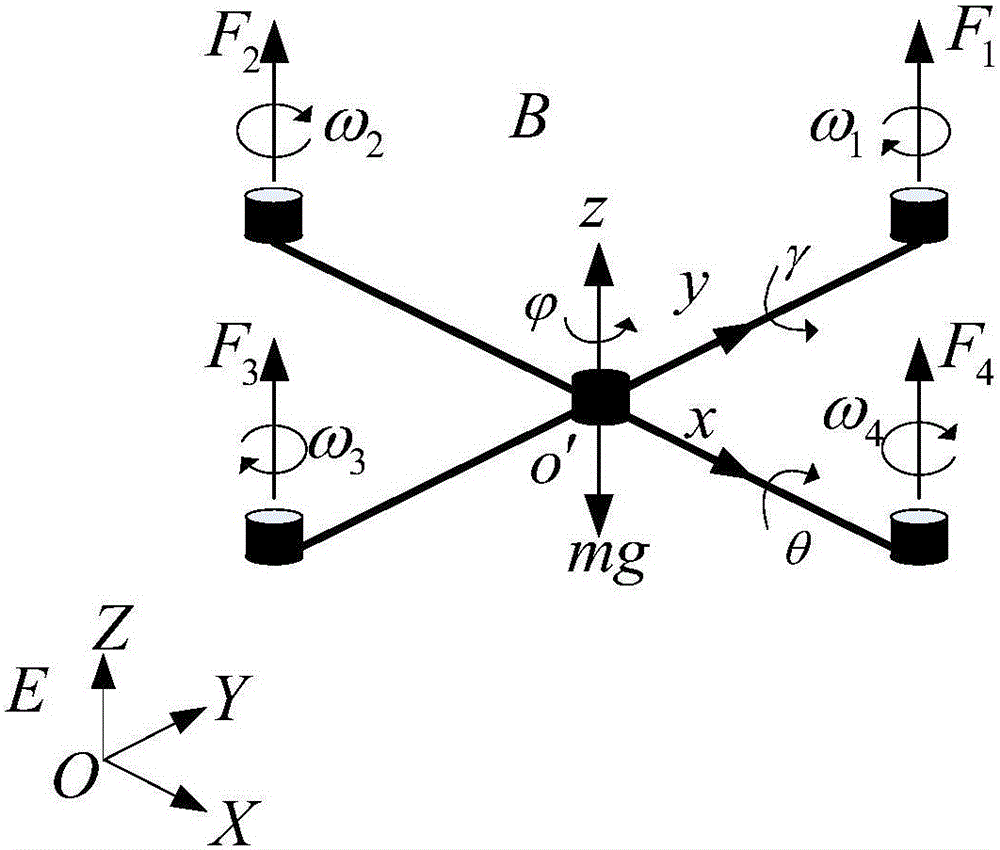
[0128] A sliding mode variable structure control method for quadrotor aircraft based on inversion method, such as figure 1 As shown, the controller adopts double closed-loop control, which are the inner attitude loop and the outer position loop respectively, and the desired trajectory of the quadrotor aircraft is given Then the roll angle γ that needs to be rotated is calculated by the inversion control algorithm d and pitch angle θ d , combined with the three attitude angles of the aircraft, the current control law obtained through the sliding mode control algorithm is sent to the dynamic model of the quadrotor aircraft, and the resulting state variables are fed back to the position loop and attitude loop to control the stable flight of the quadrotor aircraft . figure 2 A schematic diagram of a quadrotor aircraft.
[0129] In the above-mentioned technical...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More