

Plane three-degree-of-freedom electro-hydraulic mechanism type sliding loading robot
A three-degree-of-motion, mechanism-based technology, applied to mechanically driven excavators/dredgers, earth movers/shovels, construction, etc., can solve the problem of lack of anti-vibration capability, poor stability of boom lifting mechanism, and lack of overload Protection and other issues, to achieve the effect of multiple overload protection methods, improve load stability and anti-vibration performance, and a high degree of automation and intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solution of the present invention will be further described below through the drawings and embodiments.
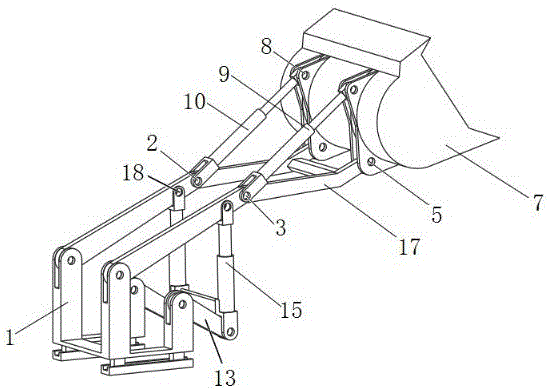
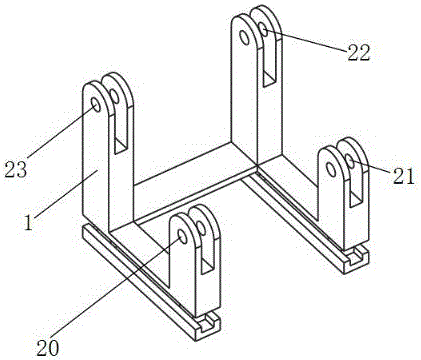
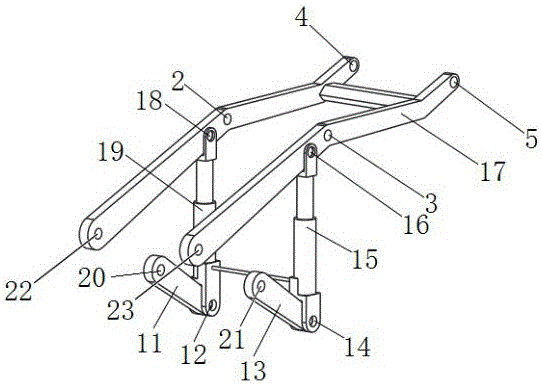
[0021] Control figure 1 , The planar three-degree-of-motion electro-hydraulic mechanism sliding loading robot of the present invention includes a boom lifting mechanism, a bucket control mechanism, and a frame 1.
[0022] Control figure 1 , figure 2 , image 3 The boom lifting mechanism includes a boom 17, a first lifting branch chain, and a second lifting branch chain. The boom 17 is connected to the frame 1 through a first rotating pair 22 and a second rotating pair 23. The first lifting branch chain includes a first active rod 13 and a first hydraulic cylinder 15. One end of the first active rod 13 is connected to the frame 1 through a third rotating pair 21, and the other end is connected to the frame 1 through a fourth rotating pair 14 One end of a hydraulic cylinder 15 is connected, and the other end of the first hydraulic cylinder 15 is connected t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More