Ship-borne unmanned aerial vehicle automatic ship landing control device based on model reference adaptive control
A technology of adaptive control and model reference, which is applied in the field of aerospace control and can solve problems such as poor real-time performance, high hardware requirements, and complex systems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The technical scheme of the present invention is described in detail below in conjunction with accompanying drawing:
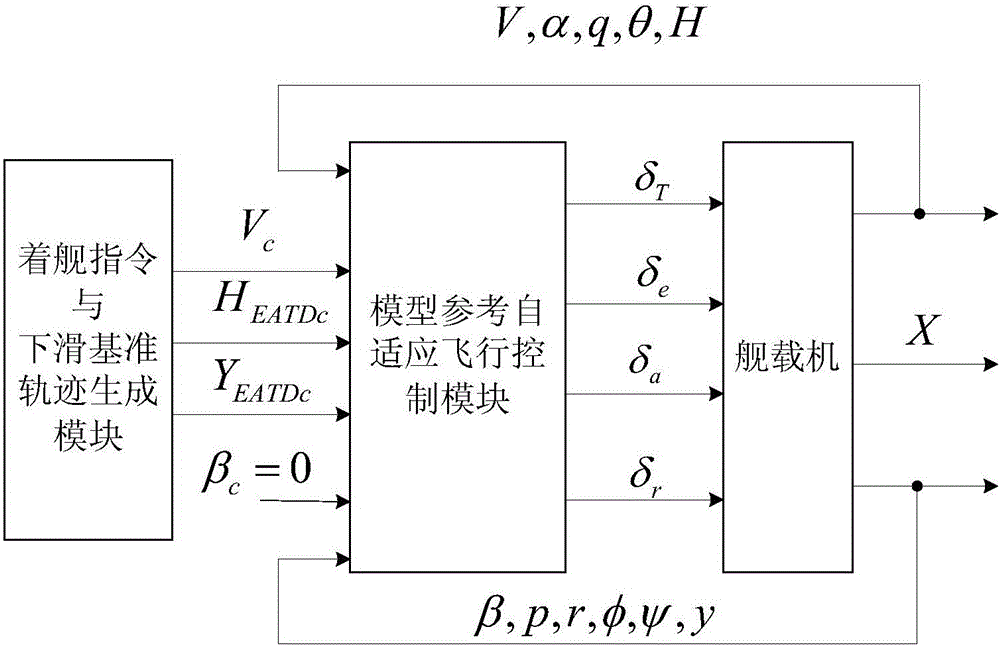
[0070] The principle of the shipboard UAV automatic landing control device based on model reference adaptive control in the present invention is as follows: figure 1 As shown in , it consists of two parts: landing command and glide reference trajectory generation module, and adaptive flight control module.
[0071] Landing command and glide reference trajectory generation module
[0072] The input signal of this module includes: the azimuth angle (ψ S +λ ac ), where ψ S is the azimuth angle of the ship, λ ac is the included angle of the inclined deck.
[0073] The output signal of this module includes the three-dimensional glide reference trajectory signal X EATDc (t), Y EATDc (t), Z EATDc (t) and speed command signal V c . Wherein, the glide reference trajectory signal and the speed command signal are output to the adaptive flight control mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More