Method for inspecting electric power lines by aid of unmanned aerial vehicle on basis of human vision characteristics
A power line and human vision technology, which is applied in the field of digital image processing and automatic inspection of power lines, can solve the problems of low efficiency of manual inspection of power lines, large consumption of human resources, and poor real-time performance, and achieves high inspection efficiency. Strong versatility and good real-time effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
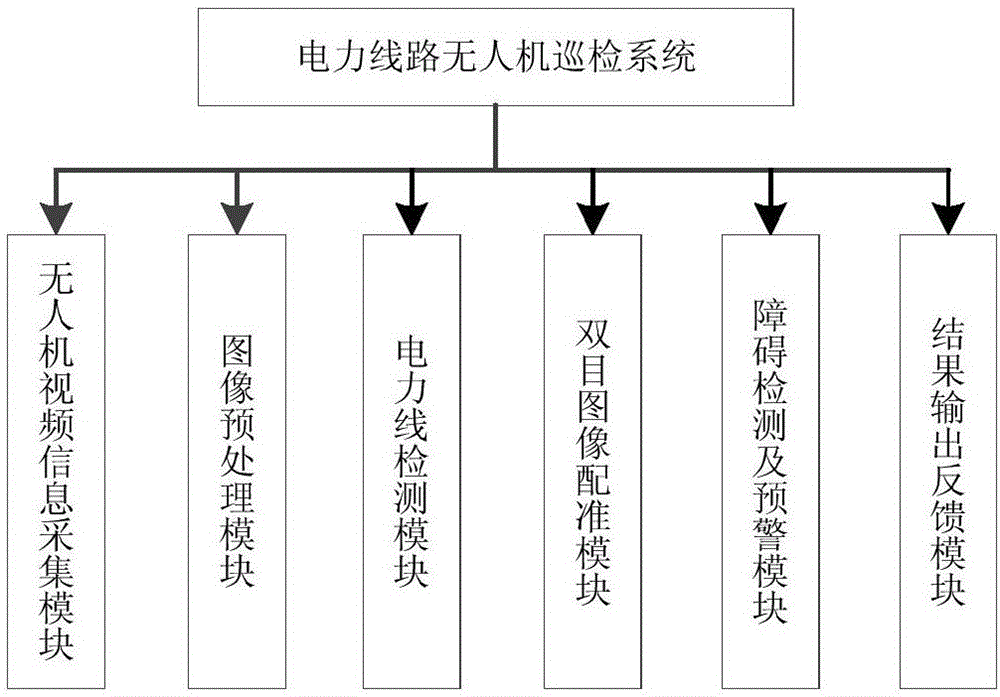
[0025] The power line unmanned aerial vehicle inspection system based on human visual characteristics of the present invention includes a hardware working system and a software operating system. The entire system module is as follows: figure 1 As shown, the hardware system includes a UAV video information acquisition module, and the software system includes an image preprocessing module, a power line detection module, a binocular image registration module, an obstacle detection and early warning module, and a result output feedback module.
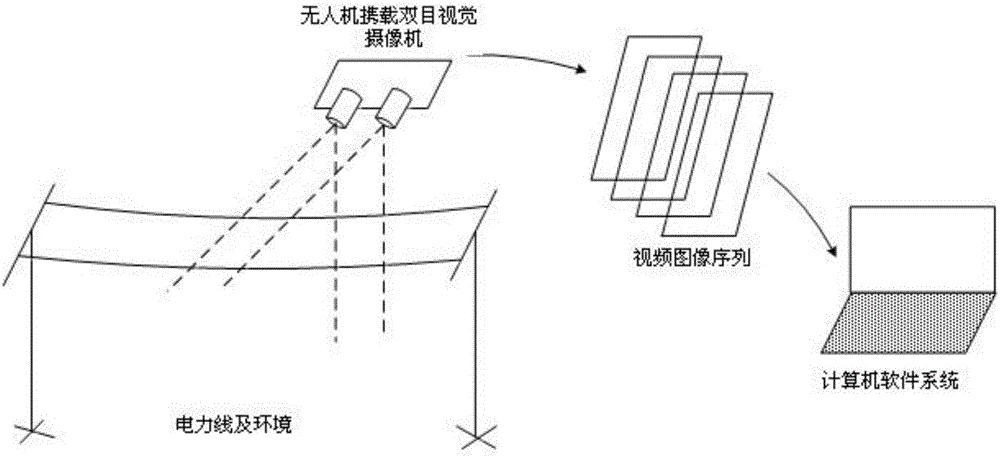
[0026] The physical model diagram is as follows figure 2 As shown, firstly, the drone is equipped with binocular vision measurement equipment to collect information on the power line to be inspected and its surrounding environment, and controls the flight of the drone. The flying direction of the drone is parallel to the distribution direction of the power line. Pass the acquired binocular video sequence to the software operating system, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More