

Reinforcement learning controller for five-degree-of-freedom bearingless permanent magnet synchronous motor and construction method thereof
A permanent magnet synchronous motor, reinforcement learning technology, applied in motor control, motor generator control, AC motor control and other directions, can solve the problem that the weight cannot be adjusted online, achieve fast learning convergence speed, strong resistance to load disturbance, Strong effect against motor parameter changes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
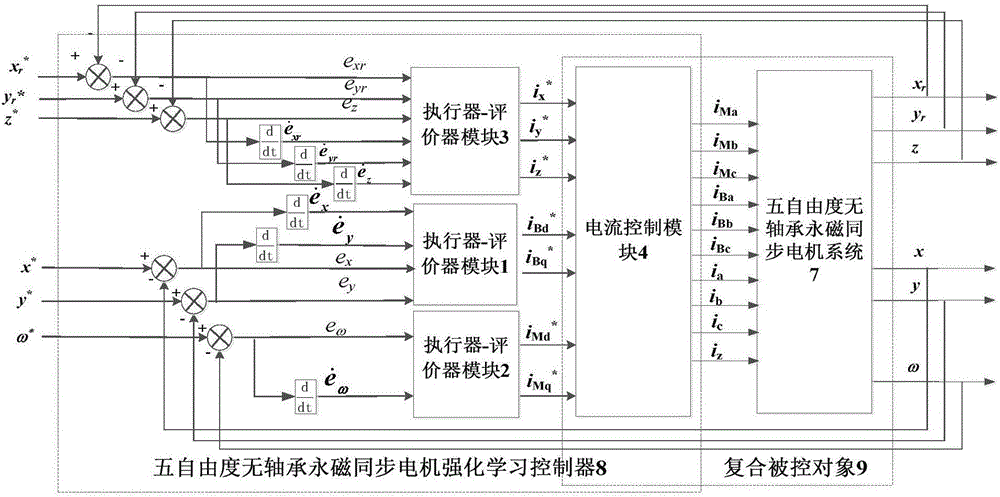
[0038] see figure 1 , the five-degree-of-freedom bearingless permanent magnet synchronous motor reinforcement learning controller 8 of the present invention is composed of a current control module 4, six differentiators and three actuator-evaluator modules, and the three actuator-evaluator modules are respectively the first An actuator-evaluator module 1 , a second actuator-evaluator module 2 and a third actuator-evaluator module 3 . The output terminals of the three actuator-evaluator modules are connected to the input terminals of the current control module 4 , and the output terminals of the current control module 4 are connected to the five-degree-of-freedom bearingless permanent magnet synchronous motor system 7 . The five-degree-of-freedom bearingless permanent magnet synchronous motor system 7 consists of a two-degree-of-freedom bearingless permanent-magnet synchronous motor and a three-degree-of-freedom hybrid magnetic bearing.
[0039] The composite controlled object...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More