Motor control method, device and system
A control device and power system technology, which is applied in the field of drones, can solve the problems of motor speed drop, slow response, and drone flying over power, so as to avoid the effect of overflying powerlessness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
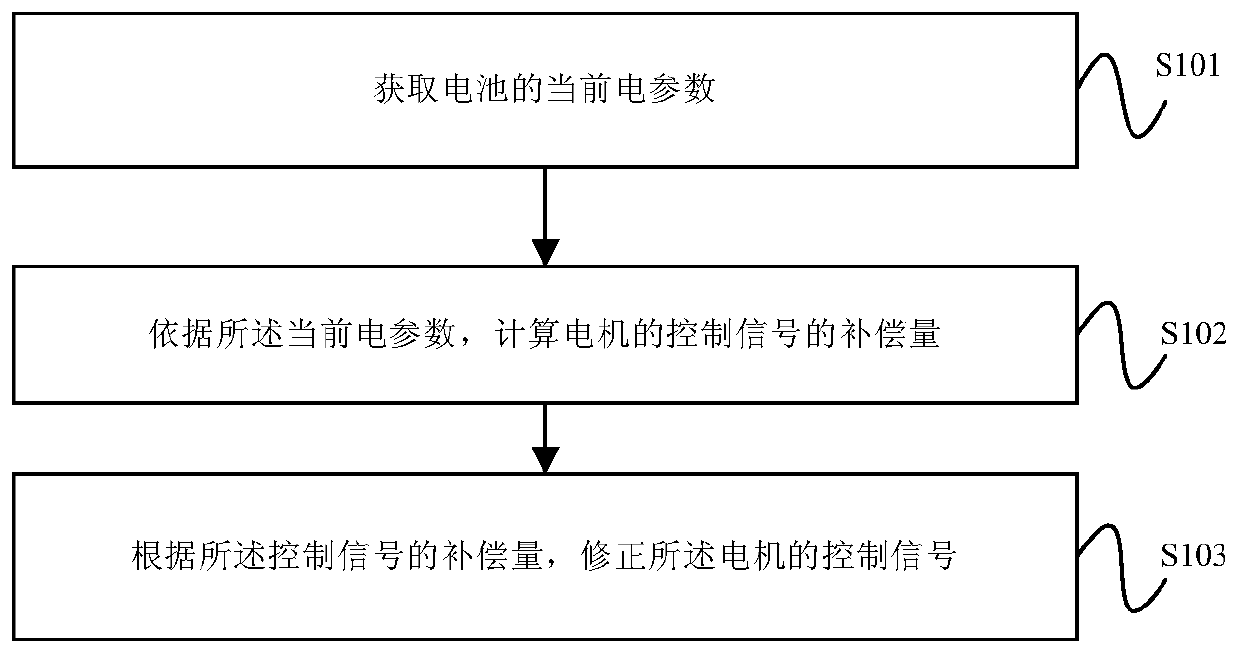
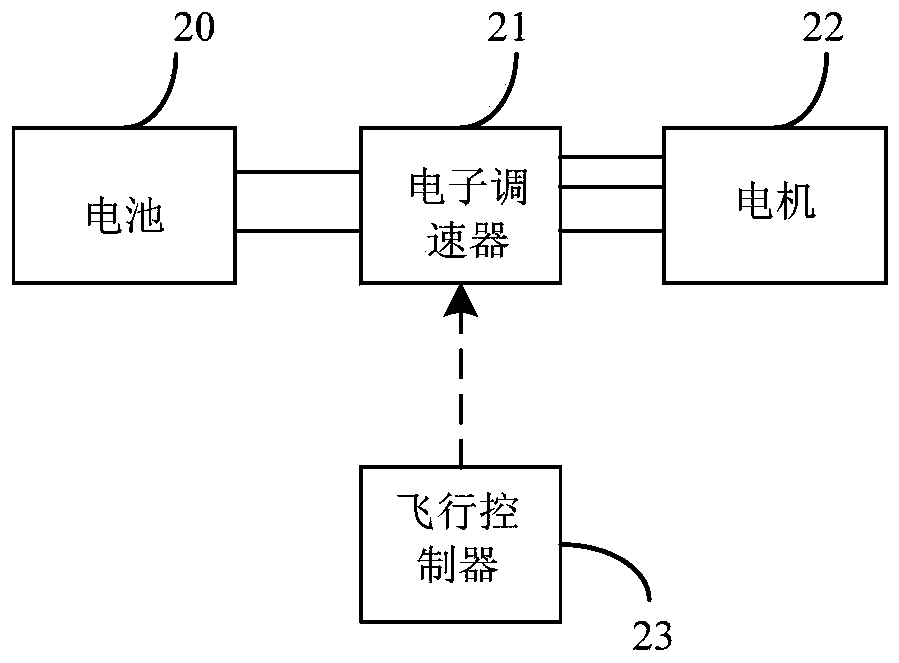
[0067] Embodiment 1 of the present invention provides a motor control method. figure 1 A flow chart of a motor control method provided in Embodiment 1 of the present invention; figure 2 The topology diagram applicable to the motor control method provided in Embodiment 1 of the present invention, such as figure 2As shown, the battery 20 supplies power to the electronic speed controller 21, and the electronic speed controller 21 outputs voltage to the motor 22 to drive the motor to rotate and control the working state of the motor 22, such as speed and steering. The flight controller 23 sends a throttle signal to the electronic governor 21 through wireless transmission, and the flight controller 23 controls the voltage output to the motor 22 according to the size of the throttle signal, and then controls the speed of the motor 22. Specifically, the throttle signal It is a rectangular wave, and the longer the high-level pulse width time in the rectangular wave, the greater the...
Embodiment 2
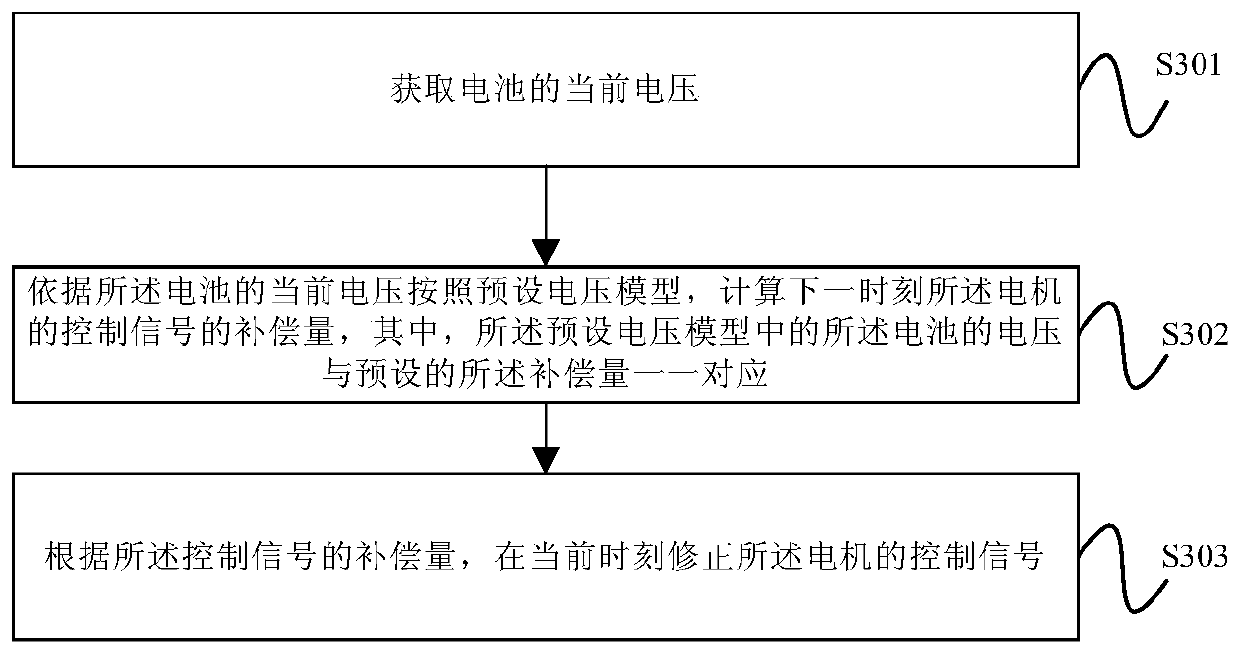
[0078] Embodiment 2 of the present invention provides a motor control method. In this embodiment, on the basis of the first embodiment above, the compensation amount of the control signal of the motor is calculated through a feed-forward control method, and the control signal of the motor is corrected according to the compensation amount of the control signal. image 3 It is a flow chart of the motor control method provided by Embodiment 2 of the present invention. Such as image 3 As shown, the method in this embodiment may include:
[0079] Step S301, obtaining the current voltage of the battery;
[0080] Specifically, the current electrical parameter of the battery is the current voltage of the battery, and the acquisition method may be to connect a voltage sensor in parallel at both ends of the power supply, and the voltage sensor can detect the voltage of the battery in real time, or periodically detect the voltage of the battery The voltage sensor is connected to the ...
Embodiment 3
[0087] Embodiment 3 of the present invention provides a motor control method. In this embodiment, on the basis of the first embodiment above, the compensation amount of the control signal of the motor is calculated through feedback control, and the control signal of the motor is corrected according to the compensation amount of the control signal. Figure 4 It is a flow chart of the motor control method provided by Embodiment 3 of the present invention. Such as Figure 4 As shown, the method in this embodiment may include:
[0088] Step S401, obtaining the current voltage of the battery;
[0089] Step S401 is the same as step S301 and will not be repeated here.
[0090] Step S402, according to the current voltage of the battery, calculate the compensation amount of the control signal of the motor in real time;
[0091] In the embodiment of the present invention, the control signal of the motor is the rotation speed of the motor. After the control device obtains the curren...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com