

Robot structure for picking up car seat
A technology of car seats and robots, which is applied to vehicle parts, manipulators, program-controlled manipulators, etc., can solve the problems that car seats cannot be delivered to processing, waste manpower and electricity and other resources, and car seats are prone to shaking, etc., to achieve saving Manpower, good gripping effect, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0009] The specific content of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
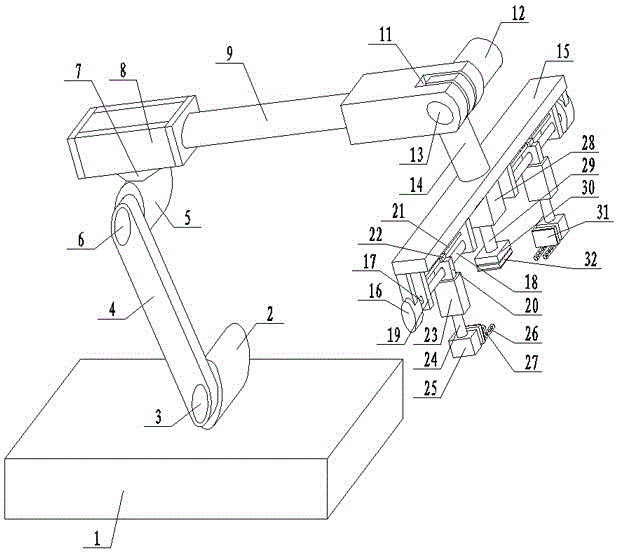
[0010] Such as figure 1 , figure 2 As shown, the car seat pick-up robot structure includes: a base 1 and a first angle rotation motor 2 fixedly arranged on the base 1, the motor shaft 3 of the first angle rotation motor 2 and the lower end of the first swing arm 4 connected, the first swing arm 4 is connected with the motor shaft 6 of the second angle rotation motor 5, and the second angle rotation motor 5 is provided with a cylinder 8 through a fixed seat 7, and the cylinder 8 A mounting seat 10 is provided on the piston rod 9, and a mounting groove 11 is provided in the mounting seat 10. A third angle rotating motor 12 is provided on one side of the mounting seat 10, and the third angle rotating motor 12 The motor shaft 13 extends into the installation groove 11 and is connected with the upper end of the second sw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More