

Monocular vision and license plate number-based vehicle distance measurement method
A measurement method, monocular vision technology, applied in the direction of sight distance measurement, measuring device, measuring distance, etc., can solve the problems of poor real-time performance and accuracy, sensitivity to light, etc., and achieve high accuracy, simple method, and false detection rate small effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
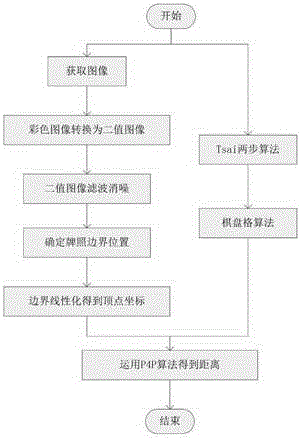
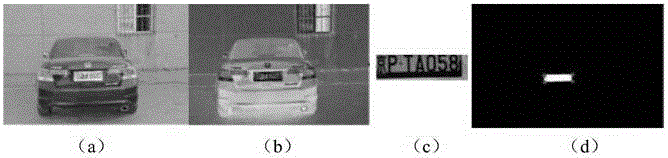
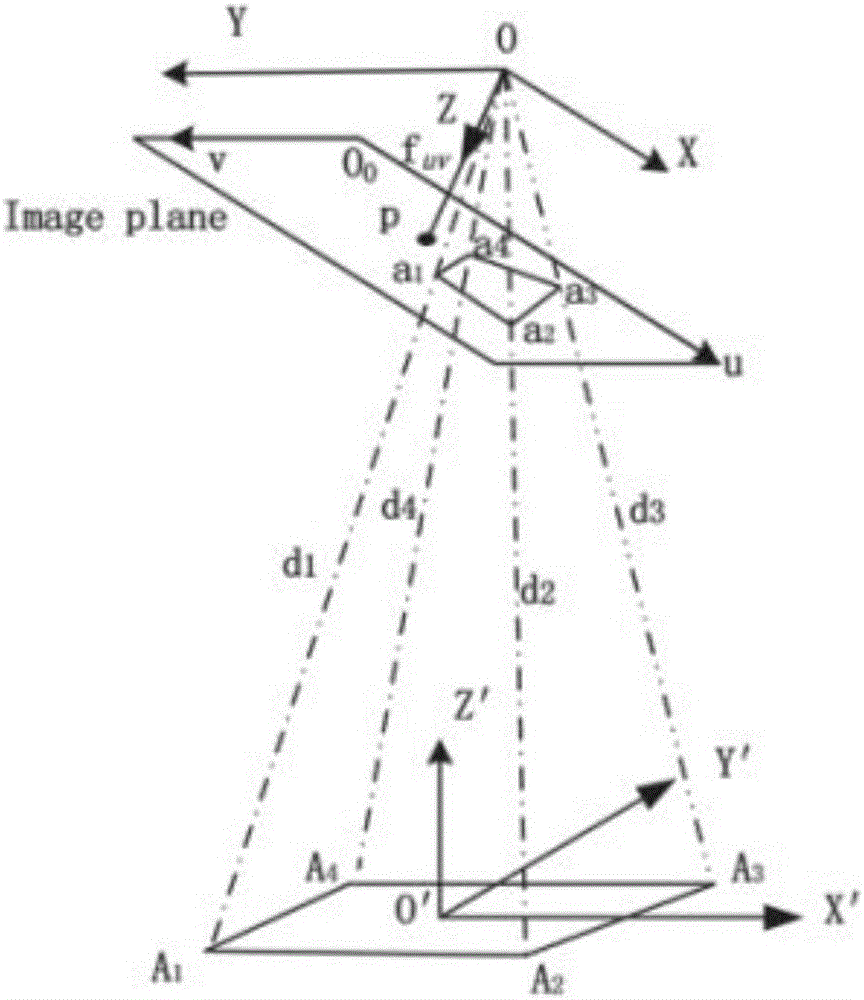
[0019] The flow chart of the present invention is as figure 1 As shown, firstly, the video image collected by the vehicle camera is converted into an HSV color space image, and then an appropriate color threshold is selected to convert the color image into a binary image, and then filter technology is used to filter out background pixels that have nothing to do with the background color of the license plate. Enhance the pixel information of the license plate part. Finally, the boundary position of the license plate is determined by the projection method, and the license plate is extracted from the original image according to the boundary position, and the license plate extraction part is completed. Linearize the extracted license plate boundary to obtain the vertex coordinates of the license plate area. The internal parameters of the camera are calibrated by using the Tsai two-step algorithm and the checkerboard sum algorithm. Finally, the vehicle distance is measured using t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More