Small celestial body soft landing autonomous navigation method based on optical and Doppler radars
A Doppler radar, soft landing autonomous technology, applied in navigation, mapping and navigation, electromagnetic wave re-radiation and other directions, can solve the problems of low estimation accuracy, slow filtering convergence speed, etc., to meet the accuracy requirements, reduce adverse effects, The effect of a quick estimate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
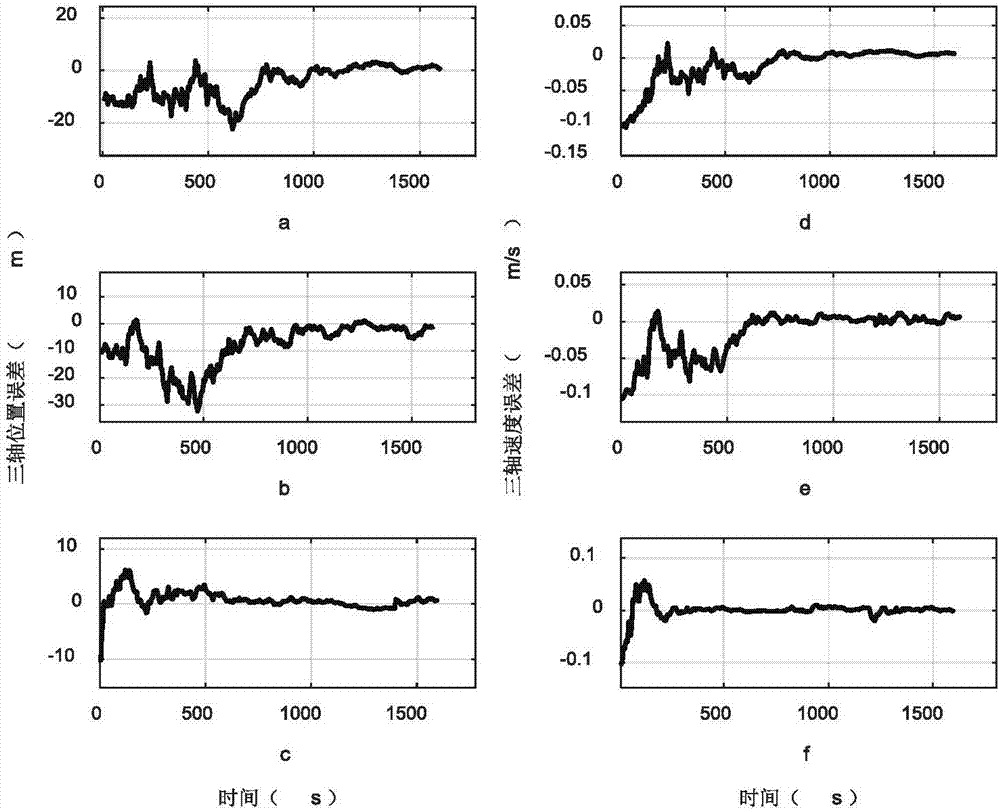
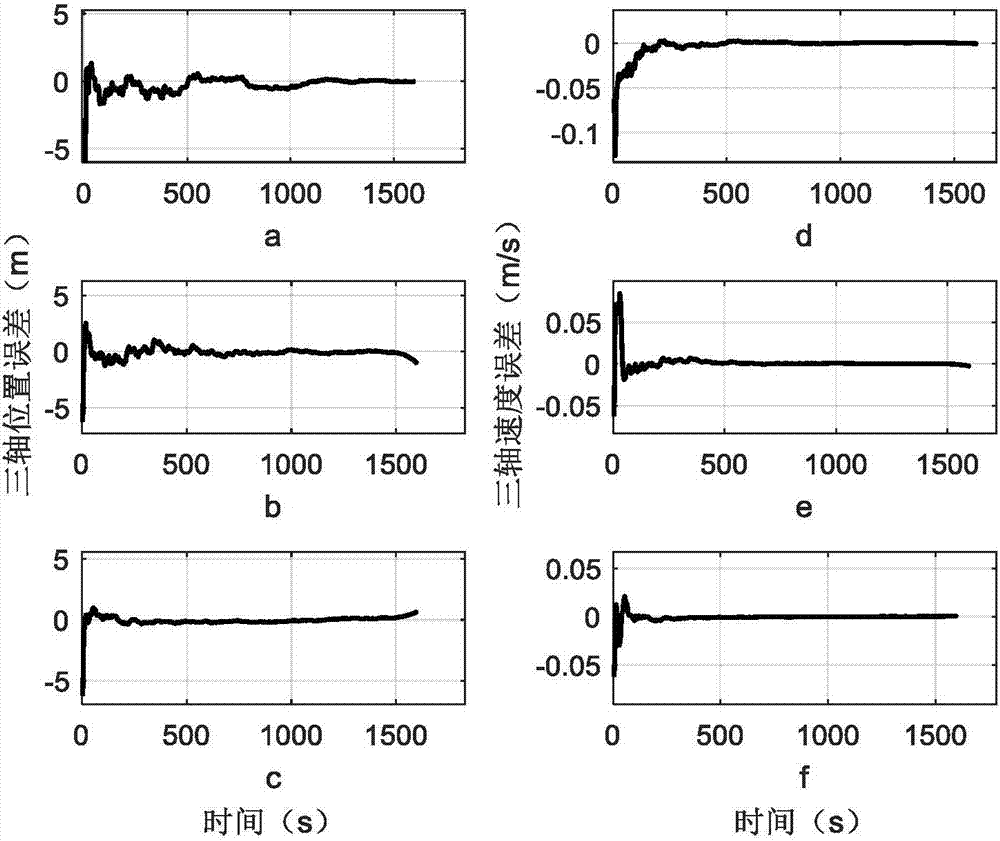
[0057] This example is aimed at the soft landing of small celestial bodies, and takes Eros433 as the target small celestial body to carry out simulation verification. The initial position of the detector in the fixed coordinate system of the small celestial body landing site is [500m, 300m, 2000m] T , the initial speed is [-0.5m / s,-0.3m / s,-0.5m / s] T , the position of the target landing point on the surface of the small celestial body is [0m,0m,0m] T . By combining the line-of-sight information measured by the optical camera and the relative distance measurement and velocity measurement information of the Doppler lidar, the extended Kalman filter (EKF) is used to jointly estimate the position and velocity state of the detector to achieve high-precision real-time autonomous navigation.
[0058] An autonomous navigation method for soft landing of small celestial bodies based on optical and Doppler radar disclosed in this example includes the following steps:
[0059] Step 1: E...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More