

Mechanical arm trajectory tracking method based on fractional-order adaptive nonsingular terminal sliding mode
A non-singular terminal and trajectory tracking technology, which is applied in the direction of adaptive control, instruments, control/regulation systems, etc., can solve the problems that the system cannot achieve the ideal sliding mode, the controller has large chattering, and the tracking error is large, etc., to achieve the expansion The effect of performance adjustment range, efficiency improvement and robustness improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
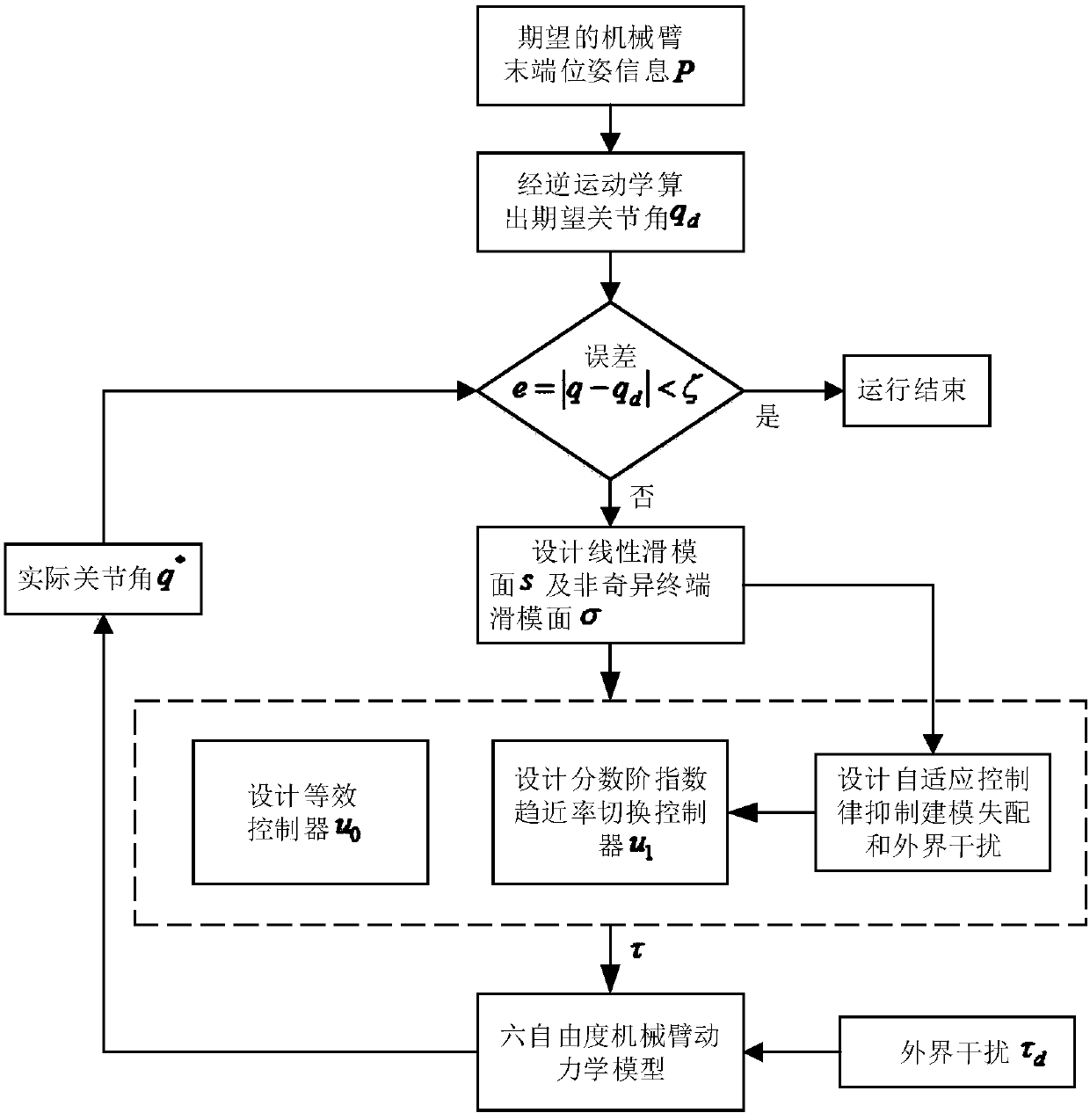
[0046] figure 1 It is a flow chart of the trajectory tracking method of a mechanical arm based on a fractional-order adaptive non-singular terminal sliding mode of the present invention.
[0047] In this embodiment, the present invention is applied to the control of a six-degree-of-freedom manipulator, that is, the six joint angles of the manipulator are tracked. Combine below figure 1 , A detailed description of the trajectory tracking method of a manipulator based on a fractional-order adaptive non-singular terminal sliding mode of the present invention, which specifically includes the following steps:
[0048] S1. According to specific task requirements, set the desired end pose sequence information of the six-degree-of-freedom manipulator as P, P∈R 4 ×4 It is a homogeneous transformation matrix, and the end pose information P is calculated by the inverse kinematics of the manipulator into the expected joint angle q of each joint d , Q d ∈R 6 And q d =[q d1 ,q d2 ,...,q d6 ] T...
example
[0086] In this example, we first verify the feasibility of the fractional-order adaptive terminal sliding mode controller proposed in the present invention, and then compare and analyze different fractional orders. The parameters used in the simulation are described below.
[0087] Suppose there are twelve states x ∈ R in the six-degree-of-freedom manipulator system 12 And
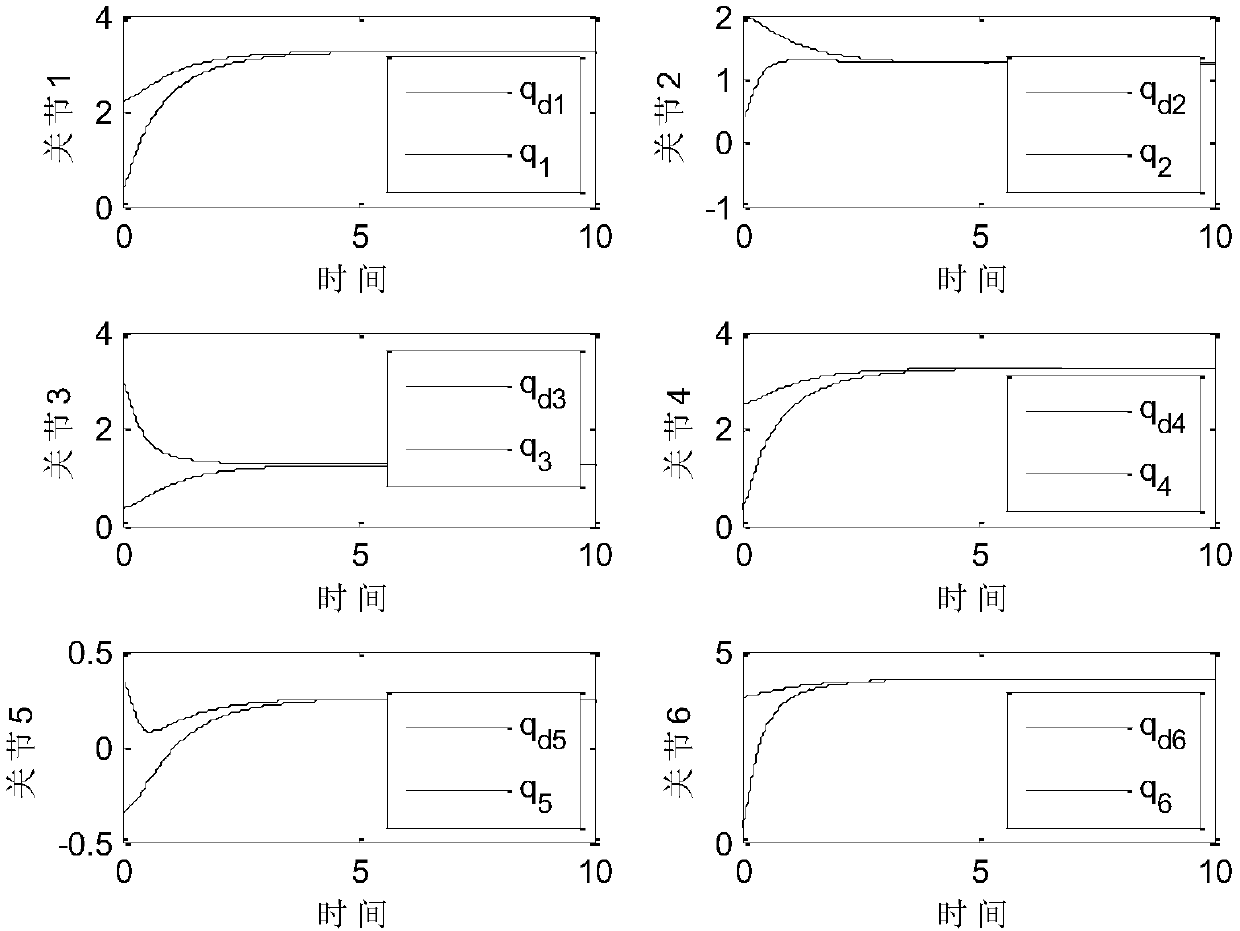
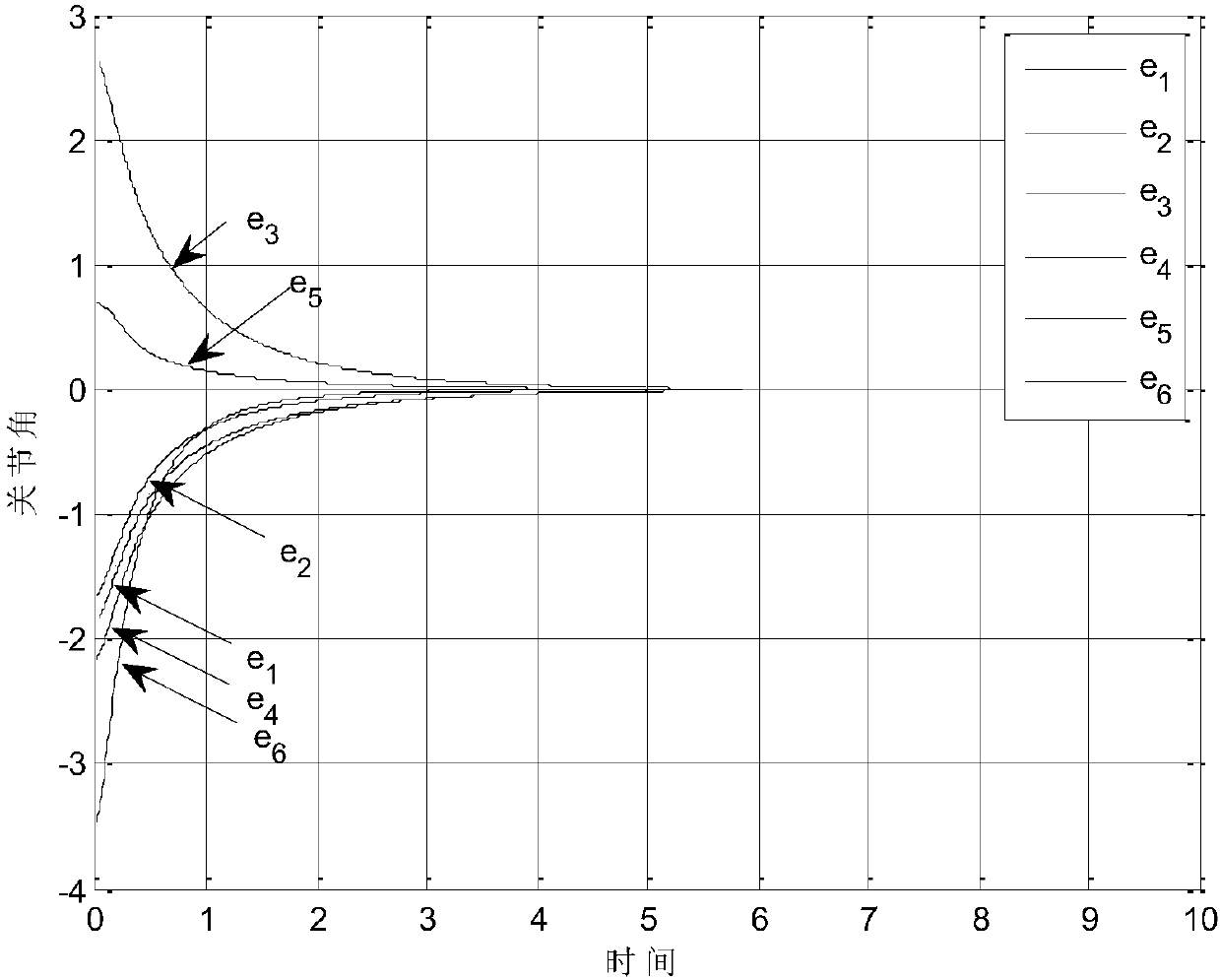
[0088] The desired trajectory of each joint angle is:
[0089] q d1 =3.25-(7 / 5)e -t +(7 / 20)e -4t , Q d2 =1.25+e -t -(1 / 4)e -4t , Q d3 =1.25-(6 / 5)e -t +(6 / 20)e- 4t , Q d4 =3.25-e- t +(5 / 20)e -4t , Q d5 =0.25-(4 / 5)e -t +(4 / 20)e -4t , Q d6 =4.25-(3 / 5)e -t +(3 / 20)e -4t .
[0090] The initial state of the robotic arm system is selected as:
[0091] q i (0) = 0.3491, (i = 1, 2, 4, 5, 6), q 3 (0)=3,
[0092] The external interference term is: τ di =0.02sin(t),i=1,3,4,5,6,τ d2 =0.1cos(2t).
[0093] For the controller proposed in the present invention, the parameters are selected as:
[0094] β=diag(30,30,30,30,30,30), γ=di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More