

UAV (unmanned aerial vehicle) robust attitude control method and device independent of angular velocity feedback
An attitude control and machine robust technology, which is applied in attitude control, vehicle position/route/height control, non-electric variable control, etc., can solve the problems of poor accuracy and robustness of UAVs, and achieve improved accuracy and robustness sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to make the objectives, technical solutions, and advantages of the embodiments of the present invention clearer, the technical solutions of the present invention will be described clearly and completely with reference to the accompanying drawings. Obviously, the described embodiments are part of the embodiments of the present invention, not all of them. 的实施例。 Example. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
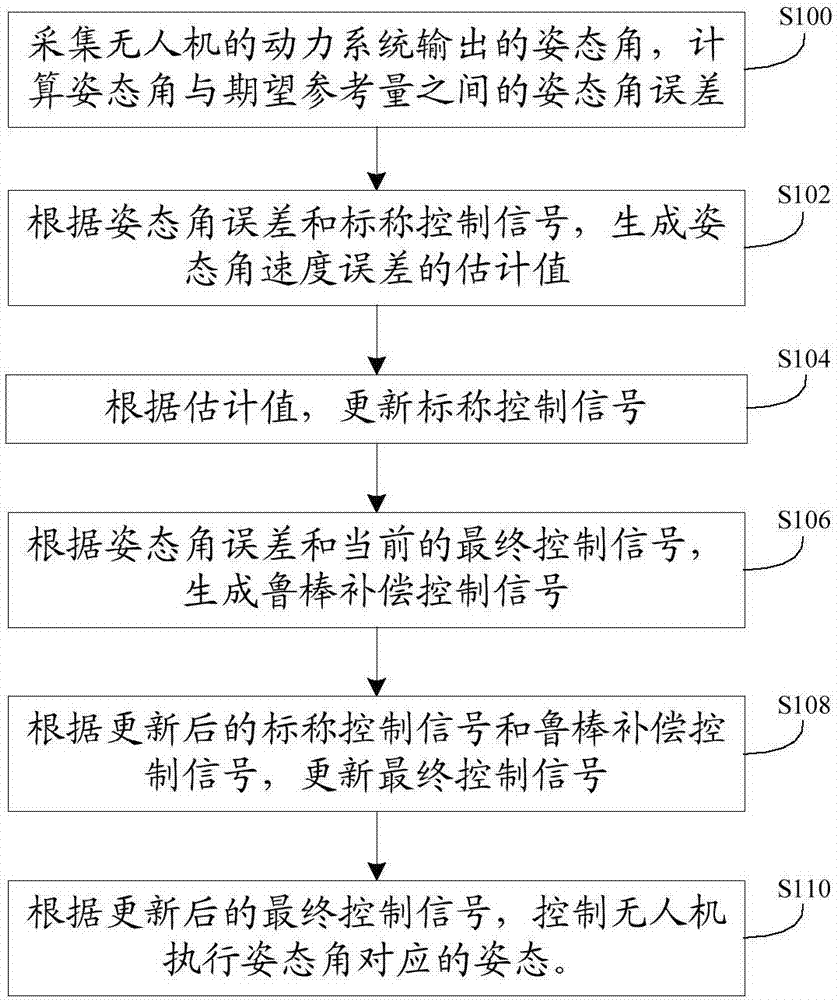
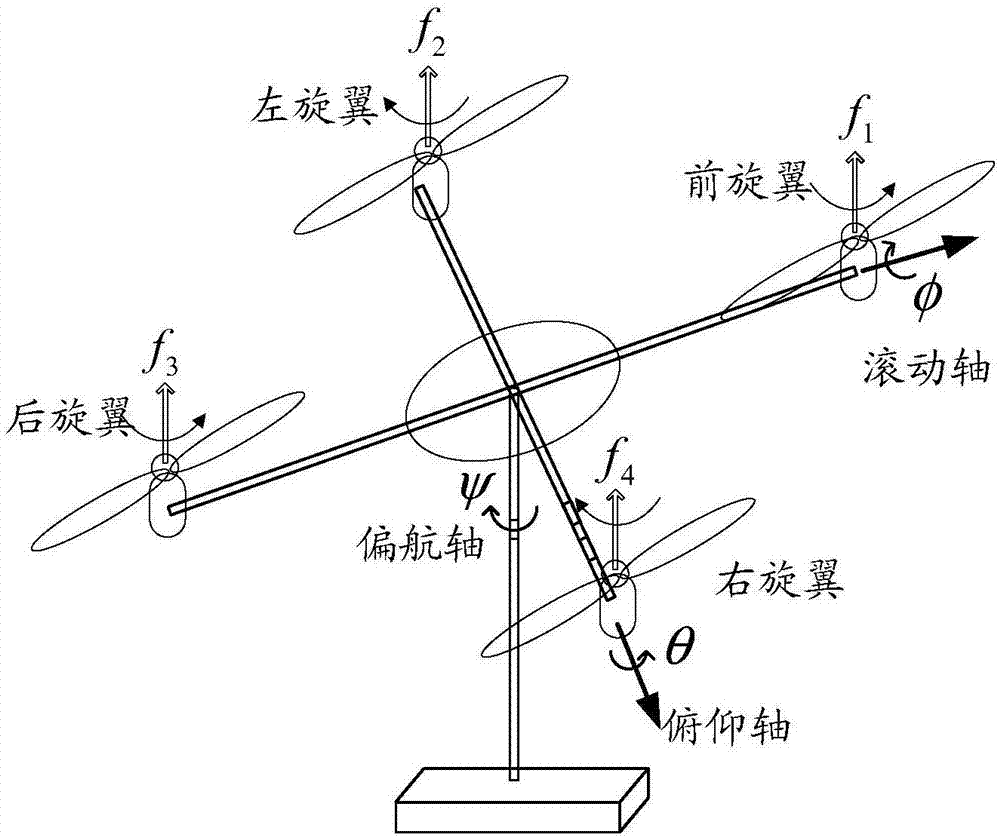
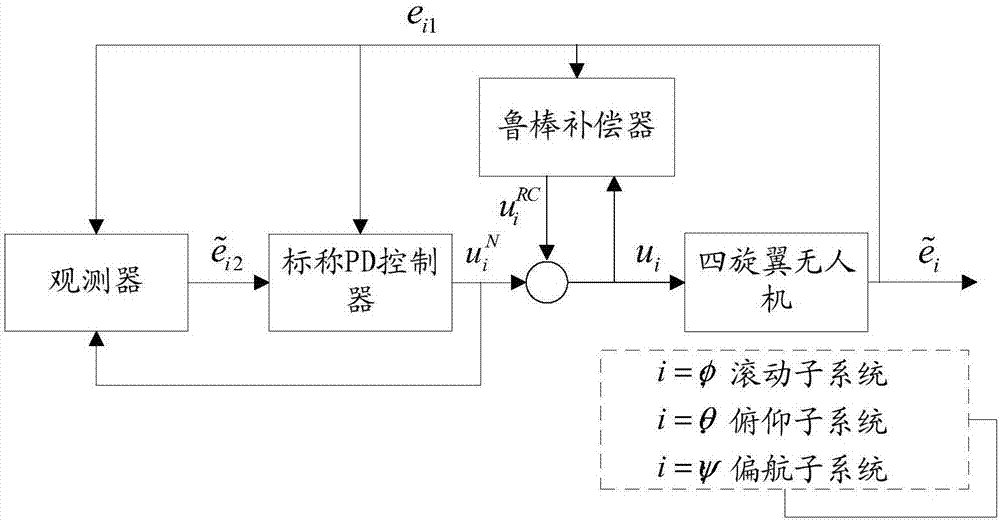
[0043] In order to make the quad-rotor UAV fly stably, the attitude control of the UAV is the basic control content; the attitude movement of the quad-rotor UAV has the characteristics of strong coupling, multi-variable, non-linear, and uncertainty, resulting in no control of the quad-rotor. It is difficult to achieve high-precision and high-robust control in the flight attitude of a human-machin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More