

Multifunctional polling robot based on distributed control and working method thereof
A patrolling robot and distributed control technology, applied in the field of robotics, can solve the problems of slowing down of the robot's running speed, high power consumption of the main control chip, and affecting the work of the robot, so as to reduce the burden, increase the accuracy of data processing, realize real-time transmission and The effect of control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
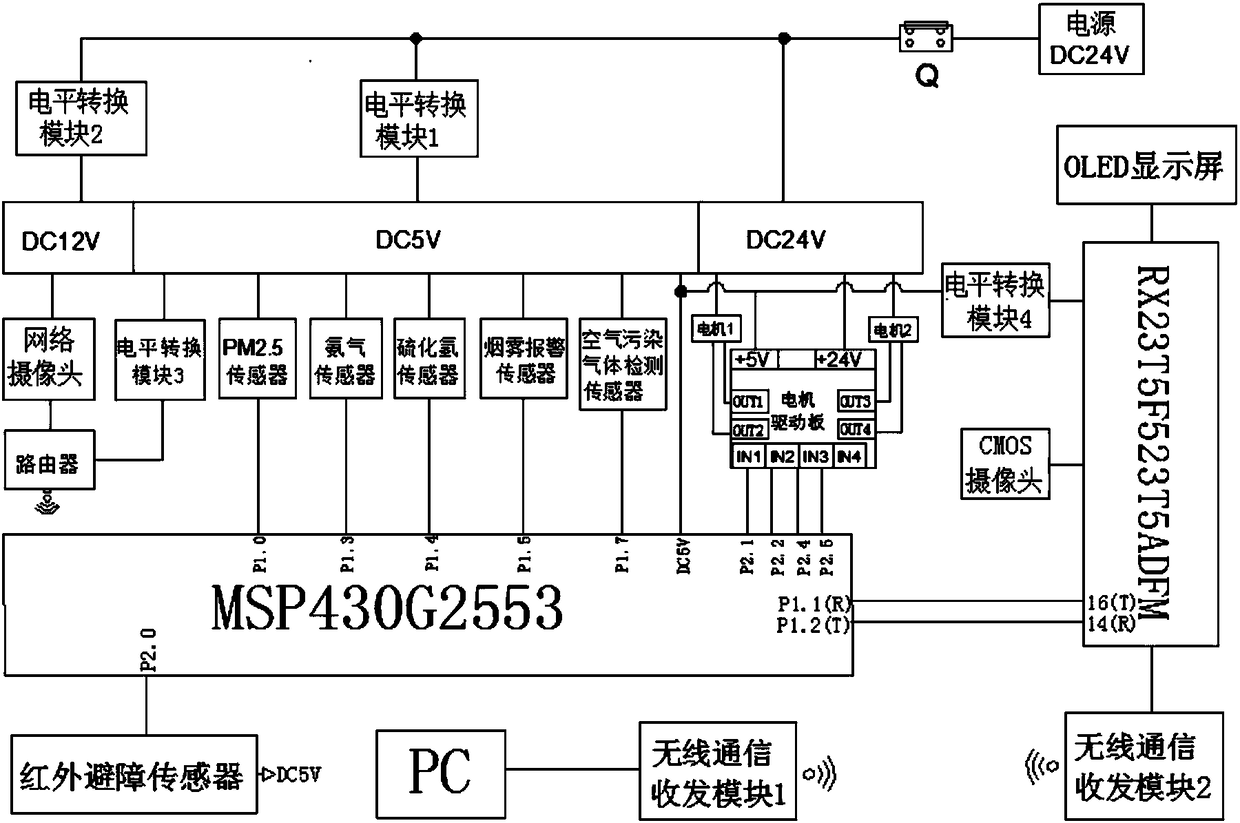
[0033] The specific implementation manner of the present invention will be described in detail below in conjunction with the accompanying drawings and preferred embodiments. Such as figure 1 As shown, a multifunctional inspection robot based on distributed control includes: power supply, level shifting module 1, level shifting module 2, level shifting module 3, level shifting module 4, first DC motor, second 2. DC motor, motor driver board, robot control unit, gas detection unit, wireless communication transceiver module, network camera, router, infrared obstacle avoidance sensor, CMOS camera, OLED display and host computer.
[0034] The output terminals of the power supply are respectively connected to the input terminals of the level conversion modules 1 and 2 and the input terminals of the DC24v terminal block; the output terminal of the level conversion module 1 is connected to the input terminal of the DC5v terminal block, and the output terminal of the level conversion m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More