Control system and method for upper limb rehabilitation training robot based on brain-computer interface
A control system and rehabilitation training technology, applied in the direction of user/computer interaction input/output, instruments, computer components, etc., can solve the problem of free control of training time for patients without severe motor disabilities, and achieve the effect of promoting repair or reconstruction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
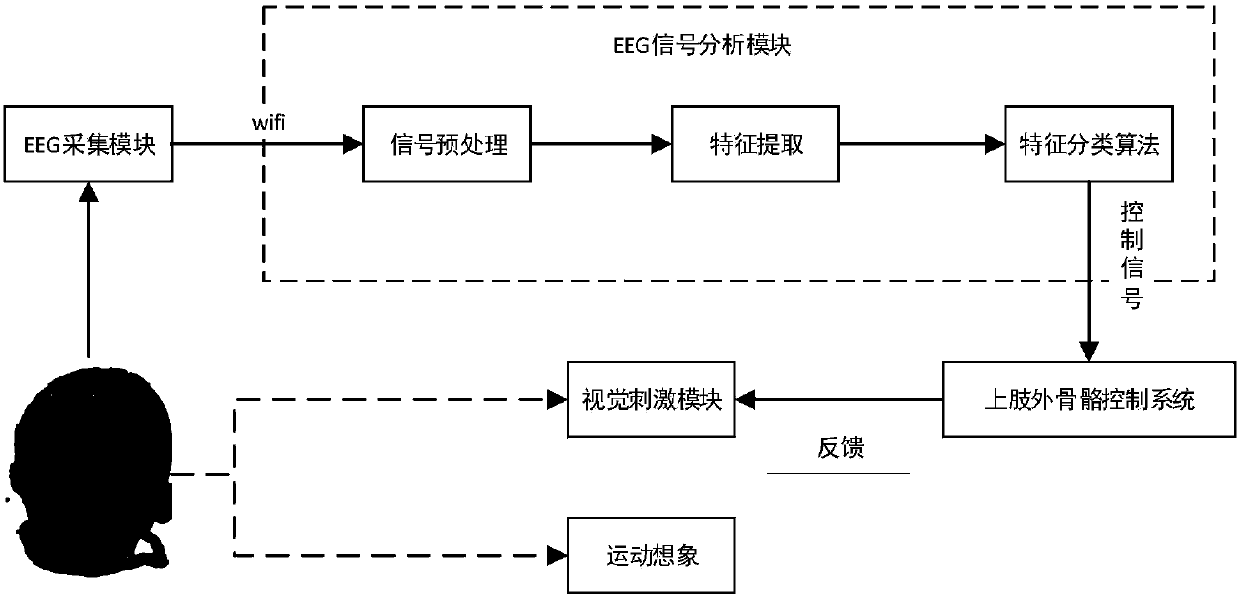
[0034] Aiming at the rehabilitation of upper limb motor function of paralyzed patients, the present invention proposes a hybrid brain-computer interface upper limb training rehabilitation robot system based on Motor Imagery (MI) and steady-state visual evoked potential (SSVEP) EEG.
[0035] Noun English abbreviation:
[0036] Steady-State Visual Evoked Potential (SSVEP), Motor Imagery (Motor Imagery, MI), Brain Computer Interface (Brain Computer Interface, BCI), Wavelet Transform (Wavelet Transform), Feature Extraction (Feature Extraction), classification Algorithm (Classification algorithm)
[0037] Common Spatial Pattern (CSP), Support Vector Machine (Support VectorMachine, SVM), Canonical Correlation Analysis (CCA)
[0038] The technical problems to be solved by the present invention are: 1) an analysis method of EEG signals; 2) distinguishing EEG ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com